Introduction
The BMI160 6-axis inertial motion sensor is a new product from DFRobot. It is based on Bosch BMI160 6-axis MEMS sensor which integrates 16-bit 3-axis accelerometer with ultra-low-power 3-axis gyroscope. Bosch BMI160 is designed for smartphones, tablets, wearable devices. It has built-in intelligent step-counting algorithms that can be read directly through registers. Built-in 3-axis acceleration and 3-axis gyroscope can detect running, fitness and other motion. Built-in LDO power management chip, supports 3.2~6V wide voltage power supply, and also has I2C level conversion circuit, compatible with Arduino 3.3V and 5V micro controller.
Application Scenarios
- Step Count
- Acceleration Detection
- Inclination Measurement
- Display Toggle Horizontal / Vertical Mode
Specifications
- Operating Voltage: 3.2V~6V
- Current Consumption: <1mA
- Interface: Gravity-IIC
- Acceleration Range: ±2g/±4g/±8g/±16g
- Gyroscopes Range: ±125°/s,±250°/s,±500°/s,±1000°/s,±2000°/s
- Acceleration Zero-g Offset: ±40mg
- Gyroscopes Zero-g Offset: ±10°/s
- Programmable Frequency: 25/32Hz~1600Hz
- 6D Detection and Location
- 16-bit Data Output
- Shock Resistance: 1000gx 200us
- 2 Independent Programmable Interrupt Generators
- In-built 1024 Byte FIFO
- Working Temperature:-40℃~ 85℃
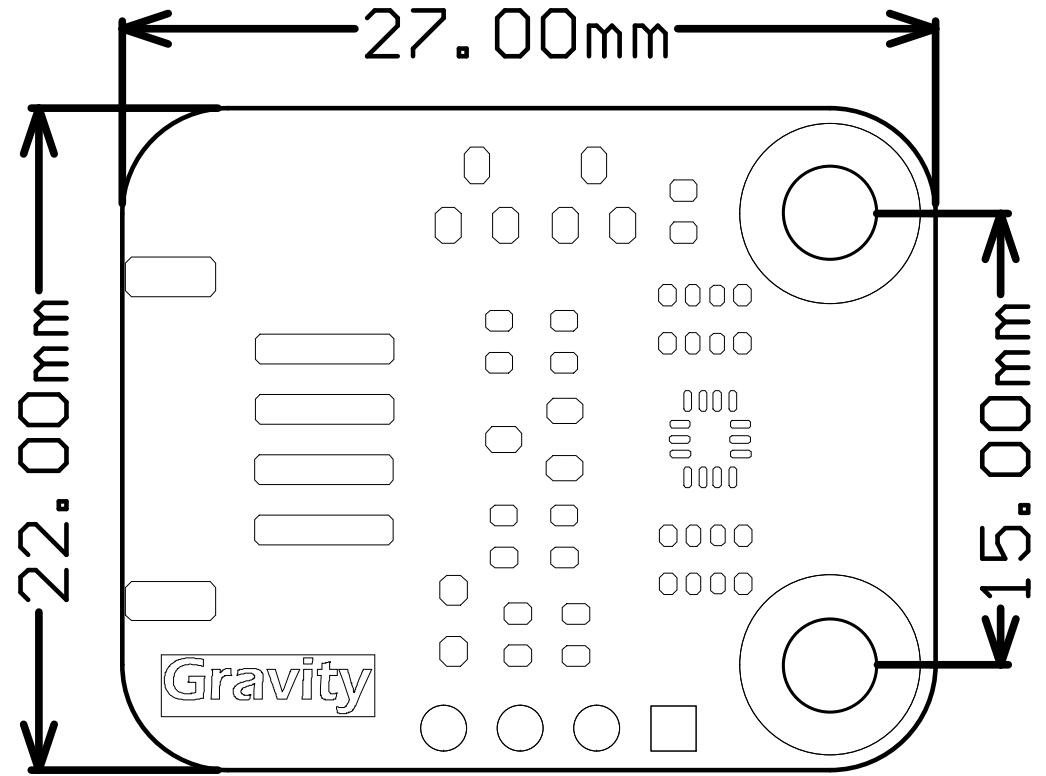
- Dimension: 22X27mm/0.87x1.06 in
Appearance and Size Chart
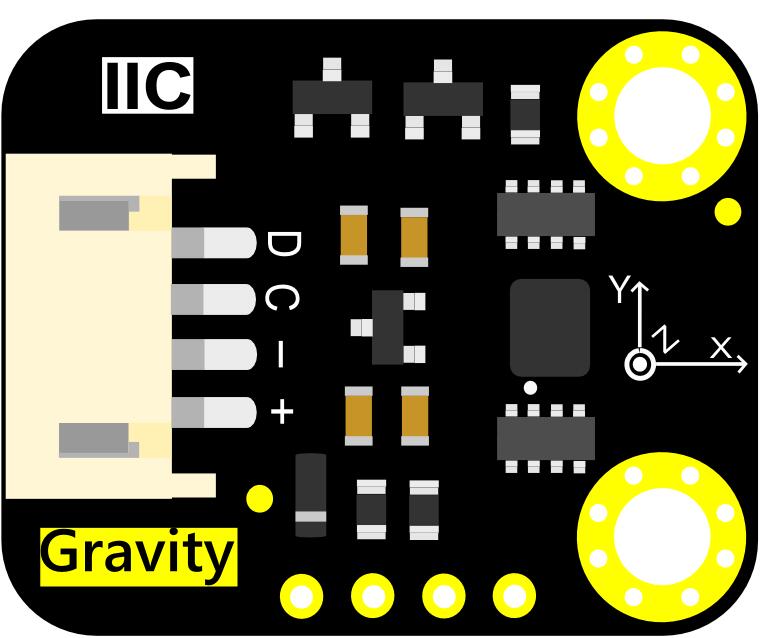
| Label | Name | Function |
|---|---|---|
| + | VCC | 3.2~6V |
| - | GND | GND |
| C | SCL | I2C-SCL |
| D | SDA | I2C-SDA |
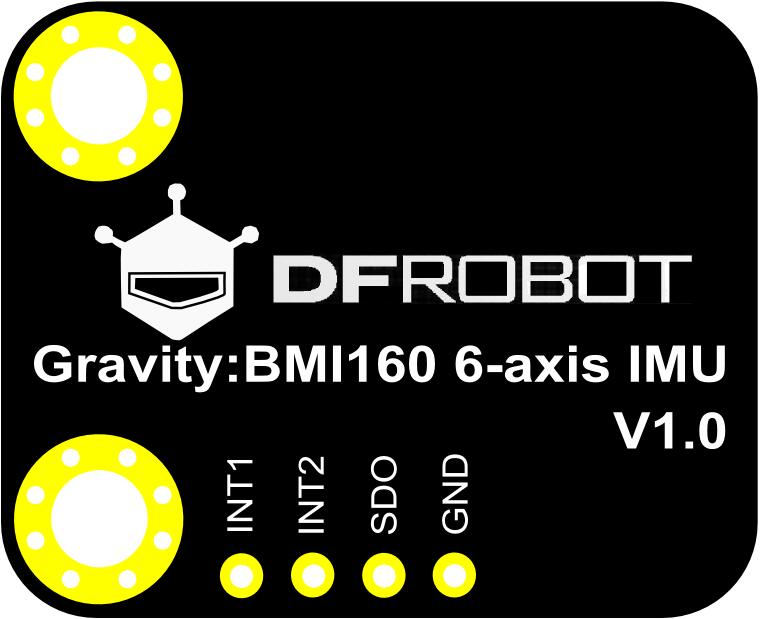
| INT1 | INT1 | Configurable interrupt output 1 |
| INT2 | INT2 | Configurable interrupt output 2 |
| SDO | SDO | Choose the address of I2C [GND: 0x68 VCC: 0x69 (Default)] |
BMI160 6-Axis IMU Sensor Pin Description
Hardware
Hardware Preparation
- 1 x BMI160 6-axis IMU
- 1 x Arduino Uno
Hardware Connection
- Connect the BMI160 6-axis IMU to Arduino board by I2C (" "can connect "3V3" or "5V")
- Connect the INT1 or INT2 to the corresponding pins on the Arduino board, as shown in the following table
| Arduino board | Corresponding Pins |
|---|---|
| Arduino UNO | D2 |
| FireBeetle-ESP32 | D13 |
| FireBeetle-ESP8266 | D13 |
| FireBeetle-Board328P | D2 |
| Leonardo | D3 |
Connection Diagram 
Examples
Step Count
| Note:I2C has two addresses: 0x69 (Default, Vacant); 0x68 (Connect SDO to GND). |
|---|
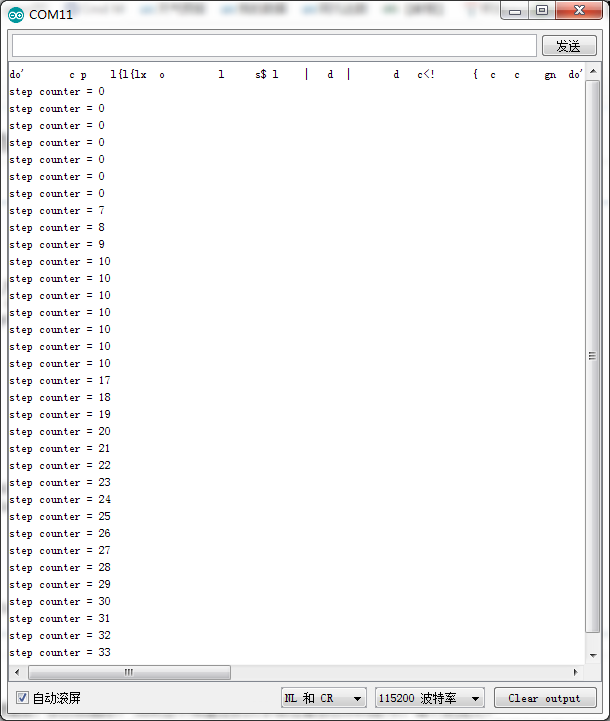
- Tip: The pedometer algorithm does not recognize steps until after seven consecutive steps, and then if you stop walking at a certain time for too long, the counter will reset,it is also applies to INT1, INT2.
- Note: At some point there is a discrepancy between the number of steps and the actual number of steps, due to the problem of the BMI chip itself."
#include <DFRobot_BMI160.h>
DFRobot_BMI160 bmi160;
const int8_t i2c_addr = 0x69;
bool readStep = false;
#if defined ARDUINO_AVR_UNO || defined ARDUINO_AVR_MEGA2560 || defined ARDUINO_AVR_PRO
//interrupt number of uno and mega2560 is 0
int pbIn = 2;
#elif ARDUINO_AVR_LEONARDO
//interrupt number of uno and leonardo is 0
int pbIn = 3;
#else
int pbIn = 13;
#endif
/*the bmi160 have two interrput interfaces*/
int int1 = 1;
int int2 = 2;
void stepChange()
{
//once the step conter is changed, the value can be read
readStep = true;
}
void setup(){
Serial.begin(115200);
delay(100);
//set and init the bmi160 i2c address
while (bmi160.I2cInit(i2c_addr) != BMI160_OK){
Serial.println("i2c init fail");
delay(1000);
}
//set interrput number to int1 or int2
if (bmi160.setInt(int1) != BMI160_OK){
Serial.println("set interrput fail");
while(1);
}
//set the bmi160 mode to step counter
if (bmi160.setStepCounter() != BMI160_OK){
Serial.println("set step fail");
while(1);
}
#if defined ARDUINO_AVR_UNO || defined ARDUINO_AVR_MEGA2560 || defined ARDUINO_AVR_LEONARDO || defined ARDUINO_AVR_PRO
//set the pin in the board to connect to int1 or int2 of bmi160
attachInterrupt(digitalPinToInterrupt(pbIn), stepChange, FALLING);
#else
attachInterrupt(pbIn, stepChange, FALLING);
#endif
}
void loop(){
if (readStep){
uint16_t stepCounter = 0;
//read step counter from hardware bmi160
if (bmi160.readStepCounter(&stepCounter)==BMI160_OK){
Serial.print("step counter = ");Serial.println(stepCounter);
}
readStep = false;
}
}Acceleration Gyroscope
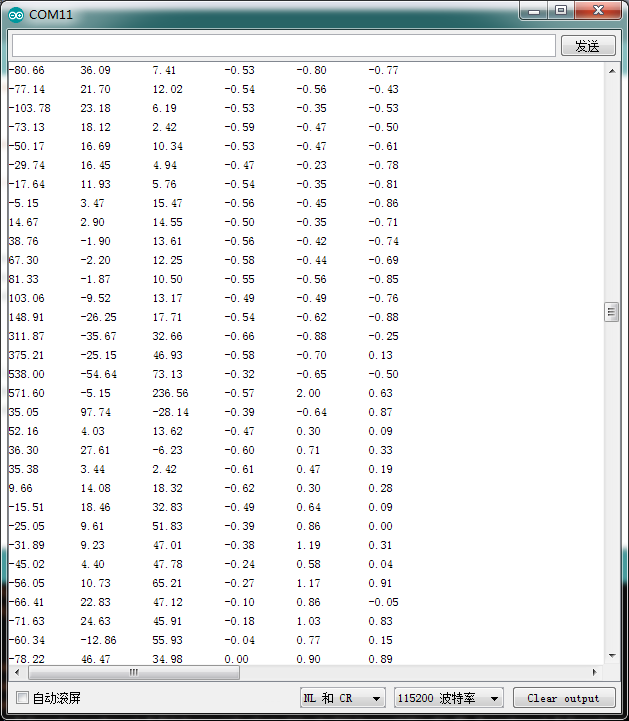
- Fig2: Gravity:BMI160 6-axis IMU Acceleration Gyroscope
- Tip:The first three columns are the data of the gyroscope in the direction of the X, Y, and Z axis, and the last three are the data of the acceleration in the direction of the X, Y, and Z axis.
#include "DFRobot_BMI160.h"
DFRobot_BMI160 bmi160;
const int8_t i2c_addr = 0x69;
void setup(){
Serial.begin(115200);
delay(100);
//init the hardware bmin160
if (bmi160.softReset() != BMI160_OK){
Serial.println("reset false");
while(1);
}
//set and init the bmi160 i2c address
if (bmi160.I2cInit(i2c_addr) != BMI160_OK){
Serial.println("init false");
while(1);
}
}
void loop(){
int i = 0;
int rslt;
int16_t accelGyro[6]={0};
//get both accel and gyro data from bmi160
//parameter accelGyro is the pointer to store the data
rslt = bmi160.getAccelGyroData(accelGyro);
if(rslt == 0){
for(i=0;i<6;i ){
if (i<3){
//the first three are gyro datas
Serial.print(accelGyro[i]*3.14/180.0);Serial.print("\t");
}else{
//the following three data are accel datas
Serial.print(accelGyro[i]/16384.0);Serial.print("\t");
}
}
Serial.println();
}else{
Serial.println("err");
}
}FAQ
| For any questions, advice or cool ideas to share, please visit the DFRobot Forum. |
|---|
More Documents
 Get Gravity: BMI160 6-Axis Inertial Motion Sensor from DFRobot Store or DFRobot Distributor.
Get Gravity: BMI160 6-Axis Inertial Motion Sensor from DFRobot Store or DFRobot Distributor.