Example Code for Arduino-Distance Measurement Mode 1
This project demonstrates how to use the Waterproof Ultrasonic Sensor in Mode 1 (UART automatic output) to measure distance.
Hardware Preparation
- Arduino UNO x1
- Waterproof Ultrasonic Ranging Module (SKU: SEN0207) x1
Software Preparation
- Arduino IDE V1.6.8. Click to Download Arduino IDE from Arduino
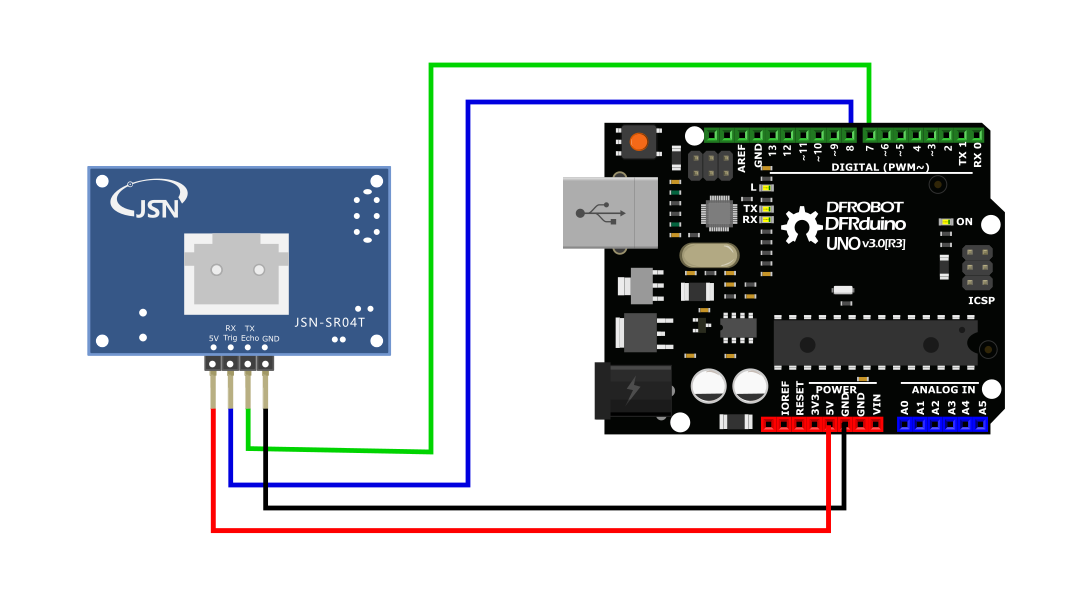
Wiring Diagram
Other Preparation Work
1.Do not power the module incorrectly. If external power is applied, always connect the GND terminal first to ensure stable operation.
2.When measuring objects, ensure the target surface is at least 0.5 m² and as flat and smooth as possible; otherwise, measurement accuracy may be affected.
3.The inductor cannot be adjusted arbitrarily.
The module supports 6 operating modes. Users can select the suitable mode based on their application requirements.
This document focuses on Mode 1.

*Mode 1: Mode=47K (or directly short M1 bit) UART automatic output
The UART automatic output mode outputs the measured distance value (hexadecimal number) according to the UART communication format. This mode does not require an external trigger signal. The module can automatically measure every 100ms. The TX pin outputs the measured distance value after each measurement is completed.
(1) Pin Definition
| Label | Name | Function |
|---|---|---|
| 1 | TX | UART Output Pinout |
| 2 | RX | / |
(2) Communication Protocol
| UART | Baud Rate | Check Bit | Data Bit | Stop Bit |
|---|---|---|---|---|
| TTL | 9600bps | N | 8 | 1 |
(3) Format Description
| Frame | Description | Byte |
|---|---|---|
| Header | Fixed to 0xff | 1 byte |
| H_DATA | The upper 8 bits of the distance data | 1 byte |
| L_DATA | The lower 8 bits of the distance data | 1 byte |
| SUM | Data Checksum | 1 byte |
Checksum only reserves the low 8 bits of the accumulated value.
For Example:
- Product Response FF 07 A1 A7
- Where the check code SUM = A7 = (0x07 + 0xA1 + 0Xff) & 0x00ff
- 0x07 is the high bit data of the distance
- 0xA1 is the low bit data of the distance
- Distance value is 0x07A1
- Equal to 1953 when converted into decimal
- Unit: mm
The module outputs the nearest distance value of 21cm in the dead zone, and outputs 0 if the module does not measure the data or is out of range. After the LED is powered on and in the working mode, it will automatically flash with 100ms.
Sample Code
/* ****************************************************
* @brief Water-proof Ultrasonic Sensor (ULS)
* @copyright [DFRobot](http://www.dfrobot.com), 2016
* @copyright GNU Lesser General Public License
* @author [huyujie]([email protected])
* @version V1.0
* @date 2020-12-7
* GNU Lesser General Public License.
* All above must be included in any redistribution
* ****************************************************/
#include <SoftwareSerial.h>
unsigned char buffer_RTT[4] = {0};// Used to store data read from the serial port
int Distance = 0;//Used to store the read distance value
unsigned char CS;//Save checksum
SoftwareSerial mySerial(10, 11); // RX, TX
void setup() {
Serial.begin(115200);
mySerial.begin(9600);
}
void loop() {
if(mySerial.available() > 0){
delay(4);
if(mySerial.read() == 0xff){ //Judge packet header
buffer_RTT[0] = 0xff;
for (int i=1; i<4; i++){
buffer_RTT[i] = mySerial.read(); //Read data
}
CS = buffer_RTT[0] + buffer_RTT[1]+ buffer_RTT[2]; //Compute checksum
if(buffer_RTT[3] == CS) {
Distance = (buffer_RTT[1] << 8) + buffer_RTT[2];//Calculate distance
Serial.print("Distance:");
Serial.print(Distance);
Serial.println("mm");
}
}
}
}
Was this article helpful?