Example Code for Arduino-Ultrasonic Ranging
This project demonstrates how to interface the Small Angle Ultrasonic Ranging Sensor (SEN0627) with an Arduino board to measure the distance to an obstacle or liquid. The sensor communicates via UART, and the Arduino reads the distance data, validates it using a checksum, and prints the result to the serial monitor. Users will learn how to use SoftwareSerial for UART communication, handle sensor data frames, and implement basic data validation.
Hardware Preparation
| Name | Model/SKU | Quantity | Purchase Link |
|---|---|---|---|
| DFRduino UNO R3 | DFR0009 | 1 | DFRduino UNO R3 |
| Small Angle Ultrasonic Ranging Sensor-8m | SEN0627 | 1 | Small Angle Ultrasonic Ranging Sensor-8m |
Software Preparation
- Arduino IDE (use the latest available version)
Wiring Diagram
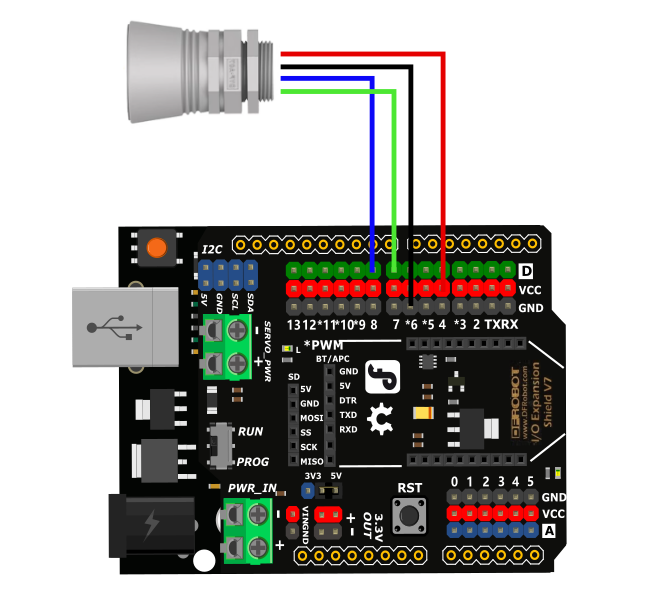
Other Preparation Work
Ensure the sensor is connected to the Arduino as per the Wiring Diagram. No additional libraries or configurations are required for this example.
Sample Code
#include <SoftwareSerial.h>
unsigned char buffer_RTT[4] = {0};
uint8_t CS;
#define COM 0x55
int Distance = 0;
SoftwareSerial mySerial(7, 8);
void setup() {
Serial.begin(9600);
mySerial.begin(9600);
}
void loop() {
mySerial.write(COM);
delay(10);
if(mySerial.available() > 0){
delay(4);
if(mySerial.read() == 0xff){
buffer_RTT[0] = 0xff;
for (int i=1; i<4; i++){
buffer_RTT[i] = mySerial.read();
}
CS = buffer_RTT[0] + buffer_RTT[1]+ buffer_RTT[2];
if(buffer_RTT[3] == CS) {
Distance = (buffer_RTT[1] << 8) + buffer_RTT[2];
Serial.print("Distance:");
Serial.print(Distance);
Serial.println("cm");
}
}
}
}
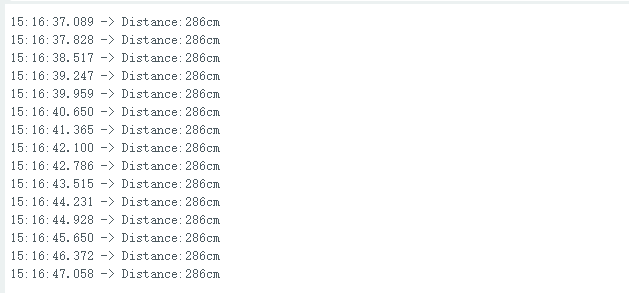
Result
If there is an obstacle or liquid in front of the sensor, the serial port prints out the distance value between the sensor and the obstacle or liquid.
Was this article helpful?