Example Code for Arduino-PWM-driven DC Motors
This project demonstrates how to use PWM signals to control the direction and speed of DC motors connected to the Romeo Mini. By adjusting PWM values and direction pins, users can learn the basics of motor control, PWM application, and proper wiring for motor drivers.
Hardware Preparation
- DC Motors: x2
- Romeo Mini: x1
Software Preparation
- Arduino IDE (download link: https://www.arduino.cc/en/software)
- ESP32 board support package (version 2.0.0) installed via Arduino Boards Manager (follow the [Arduino Environment Configuration] steps)
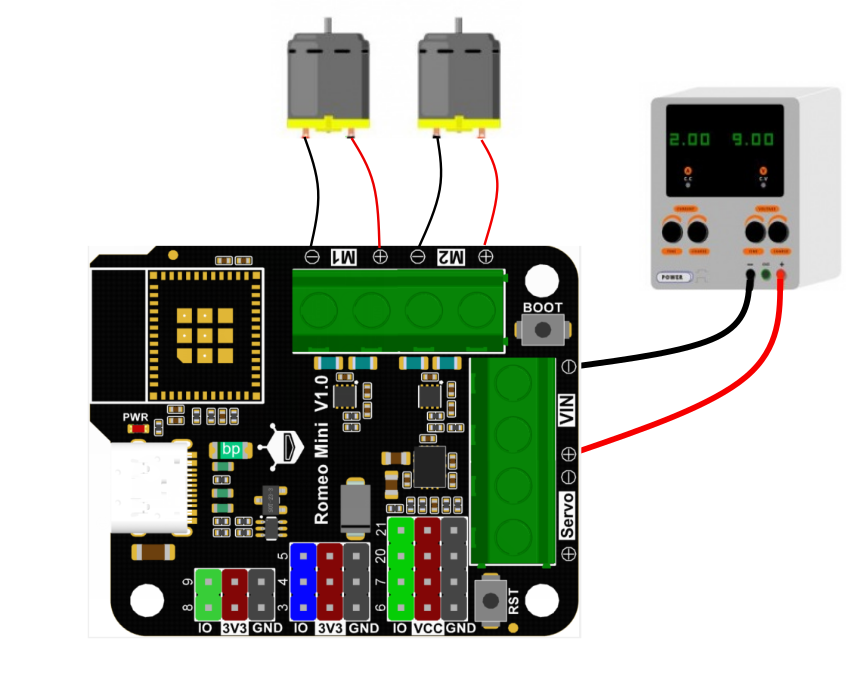
Wiring Diagram
The module is powered by 5-12V. Choose an appropriate power supply voltage based on the motors.
Other Preparation Work
- Add the ESP32 board URL to Arduino IDE: https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json
- Install the ESP32 board support package (version 2.0.0) via Tools -> Board -> Boards Manager
- Select "ESP32C3 Dev Module" from Tools -> Board
- Configure USB CDC to "Enable" for serial monitor use
- Select the correct serial port (press and hold BOOT + RST if the port is not recognized)
| EN | PH | Function |
|---|---|---|
| H | H | Forward |
| H | L | Reverse |
| PWM | L | Forward |
| PWM | H | Reverse |
Sample Code
int EN1 = 0; // PWM control for motor M1
int PH1 = 1; // Direction control for motor M1
int EN2 = 2; // PWM control for motor M2
int PH2 = 10; // Direction control for motor M2
void setup() {
pinMode(EN1, OUTPUT);
pinMode(PH1, OUTPUT);
pinMode(EN2, OUTPUT);
pinMode(PH2, OUTPUT);
}
void loop() {
M1_Forward(200); // Motor M1 moves forward with adjustable PWM
M2_Forward(200); // Motor M2 moves forward with adjustable PWM
delay(5000);
M1_Backward(200); // Motor M1 moves backward with adjustable PWM
M2_Backward(200); // Motor M2 moves backward with adjustable PWM
delay(5000);
}
void M1_Forward(int Speed1) // Forward fast decay mode for M1 motor, larger Speed1 value results in faster motor rotation
{
analogWrite(EN1, Speed1);
digitalWrite(PH1, LOW);
}
void M1_Backward
Result
Execute the sample program by commanding simultaneous rapid forward rotation of motors M1 and M2, followed by simultaneous slow reverse rotation of motors M1 and M2.
Was this article helpful?