Example Code for Raspberry Pi-Stepper Motor Drive
This article explains how to drive a stepper motor using Raspberry Pi by providing example code, wiring diagrams, and setup instructions, including I2C library installation and Python script execution.
Wiring Diagram

Other Preparation Work
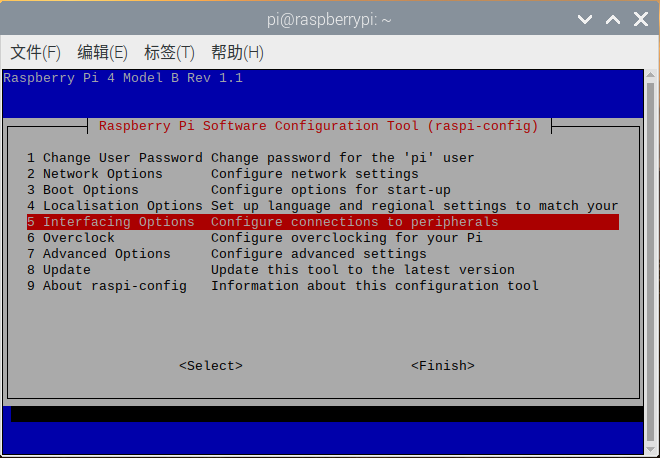
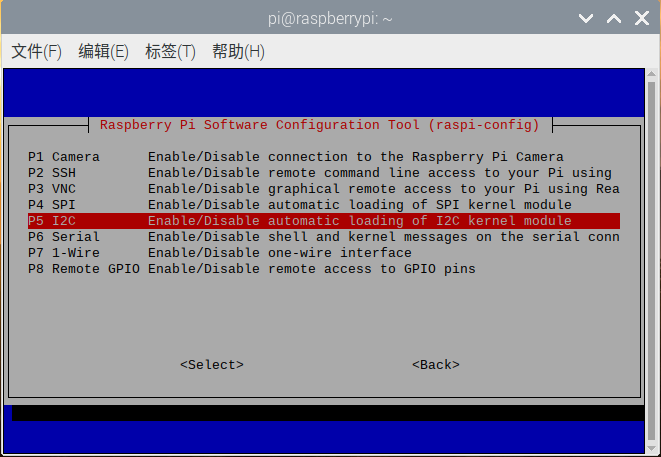
Before using the driver board, you must first install the I2C library and enable it. Open the Raspberry Pi terminal and enter the command "sudo raspi-config", then follow the order of the pictures below.
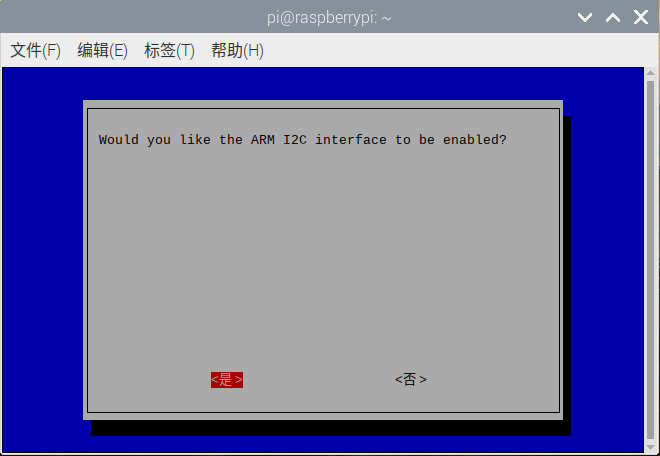

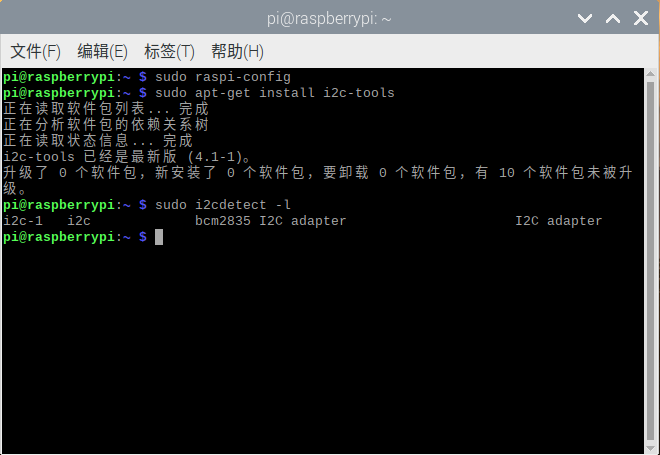
The above is to turn on the Raspberry Pi I2C, next, we install the Raspberry Pi I2C library in the terminal, enter “sudo apt-get install i2c-tools”, after entering, you can see the I2C library being downloaded. After the installation is complete, you can enter “sudo i2cdetect -l” in the terminal to check if it is installed correctly. If information similar to the following appears, it means the installation is normal.
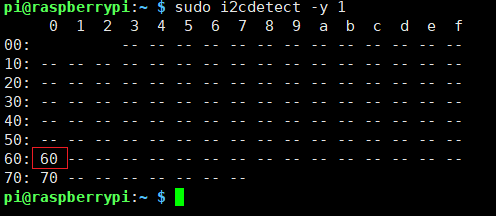
Enter “sudo i2cdetect -y 1” in the terminal to scan all I2C devices connected to the I2C bus, and print out the I2C bus address of the device. Our expansion board's I2C address is 0x60, as shown below.
Restart the Raspberry Pi to make the new settings effective:
sudo reboot
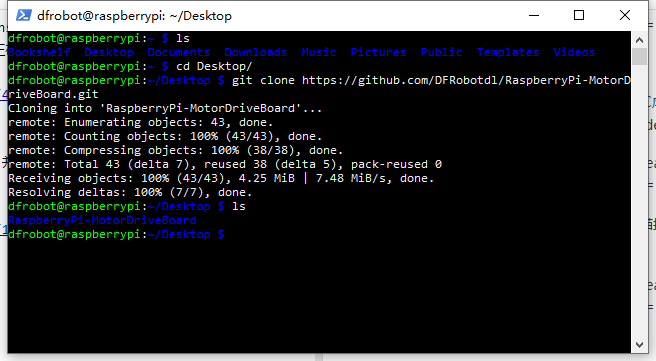
Enter the following commands in the terminal in order to download programs:
cd ...
git clone https://github.com/DFRobotdl/RaspberryPi-MotorDriveBoard.git
Sample Code
cd RaspberryPi-MotorDriveBoard/Demo/Python/StepperTest/
python3 StepperTest.py
Result

Was this article helpful?