Example Code for Arduino-Acceleration Gyroscope
The project reads 3-axis gyroscope and 3-axis accelerometer data from the BMI160. Users can learn how to retrieve combined motion data from the sensor.
Hardware Preparation
- 1 x BMI160 6-axis IMU
- 1 x Arduino Uno
Software Preparation
Wiring Diagram
- Connect the BMI160 6-axis IMU to Arduino board by I2C (" "can connect "3V3" or "5V")
- Connect the INT1 or INT2 to the corresponding pins on the Arduino board, as shown in the following table
| Arduino board | Corresponding Pins |
|---|---|
| Arduino UNO | D2 |
| FireBeetle-ESP32 | D13 |
| FireBeetle-ESP8266 | D13 |
| FireBeetle-Board328P | D2 |
| Leonardo | D3 |
Connection Diagram 
The first three columns are the data of the gyroscope in the direction of the X, Y, and Z axis, and the last three are the data of the acceleration in the direction of the X, Y, and Z axis.
Sample Code
#include "DFRobot_BMI160.h"
DFRobot_BMI160 bmi160;
const int8_t i2c_addr = 0x69;
void setup(){
Serial.begin(115200);
delay(100);
//init the hardware bmin160
if (bmi160.softReset() != BMI160_OK){
Serial.println("reset false");
while(1);
}
//set and init the bmi160 i2c address
if (bmi160.I2cInit(i2c_addr) != BMI160_OK){
Serial.println("init false");
while(1);
}
}
void loop(){
int i = 0;
int rslt;
int16_t accelGyro[6]={0};
//get both accel and gyro data from bmi160
//parameter accelGyro is the pointer to store the data
rslt = bmi160.getAccelGyroData(accelGyro);
if(rslt == 0){
for(i=0;i<6;i ){
if (i<3){
//the first three are gyro datas
Serial.print(accelGyro[i]*3.14/180.0);Serial.print("\t");
}else{
//the following three data are accel datas
Serial.print(accelGyro[i]/16384.0);Serial.print("\t");
}
}
Serial.println();
}else{
Serial.println("err");
}
}
Result
The serial port will output 6 columns of data: the first three are gyroscope data (X, Y, Z axes) in radians per second, and the last three are accelerometer data (X, Y, Z axes) in g.
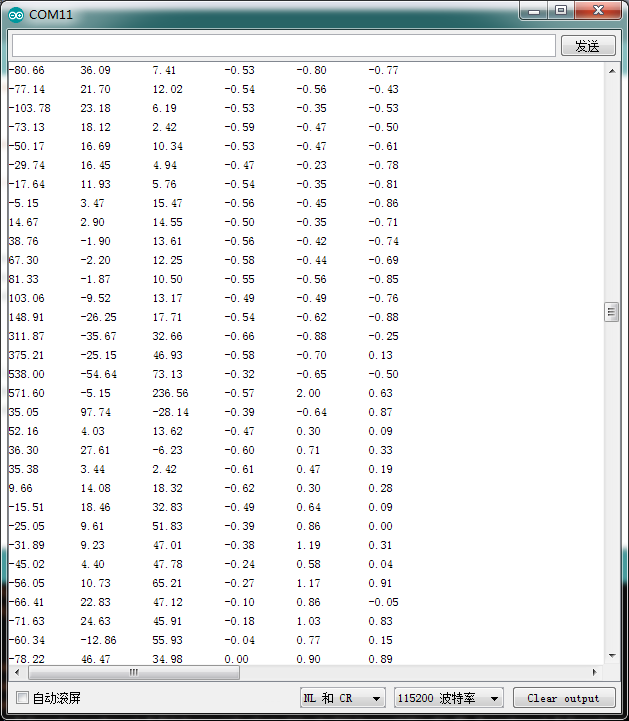
- Fig2: Gravity:BMI160 6-axis IMU Acceleration Gyroscope
Was this article helpful?