Example Code for Arduino-External Interrupt
Last revision 2025/12/18
Interrupt detection. In this example, the enable eZHigherThanTh interrupt event means when the acceleration in the Z direction exceeds the threshold set by the program, the interrupt level can be detected on the interrupt pin int1/int2 we set, and the level change on the interrupt pin can be used to determine whether the interrupt occurs. The following are the 6 settable interrupt events:eXHigherThanTh, eXLowerThanTh, eYHigherThanTh, eYLowerThanTh, eZHigherThanTh, eZLowerThanTh. For a detailed explanation of each of them, please look up the comments of the enableInterruptEvent() function. This example needs to connect the int2/int1 pin of the module to the interrupt pin of the motherboard. Default UNO(2), Mega2560(2), Leonardo(3), microbit(P0),FireBeetle-ESP8266(D6),FireBeetle-ESP32((D6),FireBeetle-M0(6).
Hardware Preparation
- Firebeetle Board-M0 × 1
- H3LIS200DL Triple Axis Accelerometer × 1
- Jumper wires
Software Preparation
- Arduino IDE
- Download and install the LIS Series Library and Sample Code. (About how to install the library?)
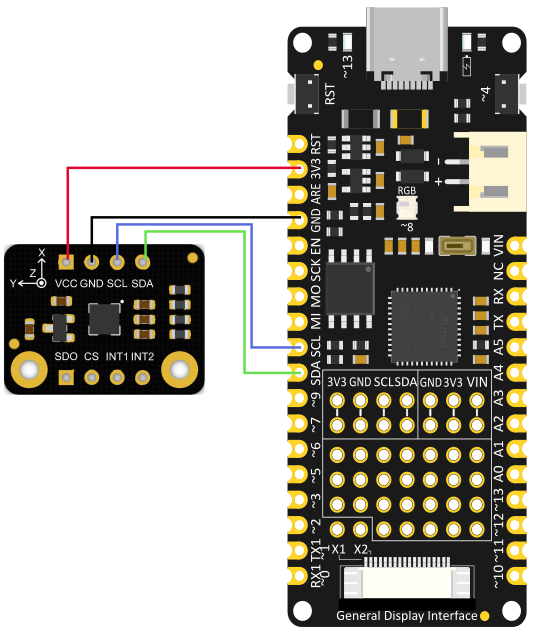
Wiring Diagram
Connect your sensor to an M0 controller (or others) according to the connection diagram below
Other Preparation Work
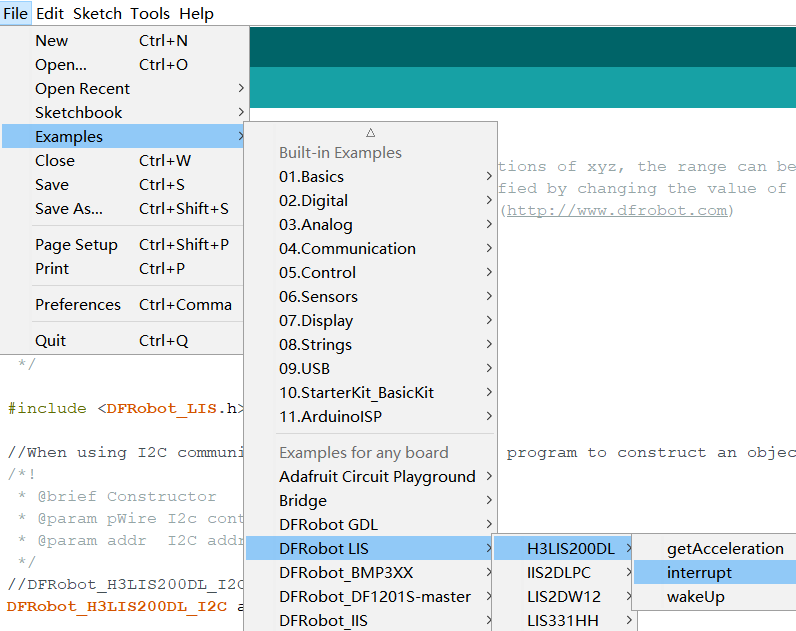
- Select interrupt.ino
Sample Code
/**!
* @file interrupt.ino
* @brief Interrupt detection
* @n In this example, the enable eZHigherThanTh interrupt event means when the acceleration in the Z direction exceeds the
* @n threshold set by the program, the interrupt level can be detected on the interrupt pin int1/int2 we set, and the level change on the
* @n interrupt pin can be used to determine whether the interrupt occurs. The following are the 6 settable interrupt events:eXHigherThanTh,
* @n eXLowerThanTh, eYHigherThanTh, eYLowerThanTh, eZHigherThanTh, eZLowerThanTh. For a detailed explanation of each of them,
* @n please look up the comments of the enableInterruptEvent() function.
* @n This example needs to connect the int2/int1 pin of the module to the interrupt pin of the motherboard. Default UNO(2), Mega2560(2),
* @n Leonardo(3), microbit(P0),FireBeetle-ESP8266(D6),FireBeetle-ESP32((D6),FireBeetle-M0(6)
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli]([email protected])
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS.h>
//When using I2C communication, use the following program to construct an object by DFRobot_H3LIS200DL_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_H3LIS200DL_I2C acce(&Wire,0x18);
DFRobot_H3LIS200DL_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_H3LIS200DL_SPI
#if defined(ESP32) || defined(ESP8266)
#define H3LIS200DL_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define H3LIS200DL_CS 3
#elif (defined NRF5)
#define H3LIS200DL_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs : Chip selection pinChip selection pin
* @param spi :SPI controller
*/
//DFRobot_H3LIS200DL_SPI acce(/*cs = */H3LIS200DL_CS);
//Interrupt generation flag
volatile bool intFlag = false;
void interEvent(){
intFlag = true;
}
void setup(void){
Serial.begin(9600);
//Chip initialization
while(!acce.begin()){
delay(1000);
Serial.println("Initialization failed, please check the connection and I2C address settings");
}
//Get chip id
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
/**
set range:Range(g)
eH3lis200dl_100g,/< ±100g>/
eH3lis200dl_200g,/< ±200g>/
*/
acce.setRange(/*Range = */DFRobot_LIS::eH3lis200dl_100g);
/**
Set data measurement rate:
ePowerDown_0HZ = 0,
eLowPower_halfHZ,
eLowPower_1HZ,
eLowPower_2HZ,
eLowPower_5HZ,
eLowPower_10HZ,
eNormal_50HZ,
eNormal_100HZ,
eNormal_400HZ,
eNormal_1000HZ,
*/
acce.setAcquireRate(/*Rate = */DFRobot_LIS::eNormal_50HZ);
#if defined(ESP32) || defined(ESP8266)
//The D6 pin is used as the interrupt pin by default, and other non-conflicting pins can also be selected as the external interrupt pin.
attachInterrupt(digitalPinToInterrupt(D6)/*Query the interrupt number of the D6 pin*/,interEvent,CHANGE);
#elif defined(ARDUINO_SAM_ZERO)
//The pin 5 is used as the interrupt pin by default, and other non-conflicting pins can also be selected as the external interrupt pin.
attachInterrupt(digitalPinToInterrupt(5)/*Query the interrupt number of the pin 5*/,interEvent,CHANGE);
#else
/* The Correspondence Table of AVR Series Arduino Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------
* | | DigitalPin | 2 | 3 | |
* | Uno, Nano, Mini, other 328-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | |
* |-------------------------------------------------------------------------------------|
* | | Pin | 2 | 3 | 21 | 20 | 19 | 18 |
* | Mega2560 |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | 5 |
* |-------------------------------------------------------------------------------------|
* | | Pin | 3 | 2 | 0 | 1 | 7 | |
* | Leonardo, other 32u4-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | |
* |--------------------------------------------------------------------------------------
*/
/* The Correspondence Table of micro:bit Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------------------------------------------------------------
* | micro:bit | DigitalPin |P0-P20 can be used as an external interrupt |
* | (When using as an external interrupt, |---------------------------------------------------------------------------------------------|
* |no need to set it to input mode with pinMode)|Interrupt No|Interrupt number is a pin digital value, such as P0 interrupt number 0, P1 is 1 |
* |-------------------------------------------------------------------------------------------------------------------------------------------|
*/
attachInterrupt(/*Interrupt No*/0,interEvent,CHANGE);//Open the external interrupt 0, connect INT1/2 to the digital pin of the main control:
//UNO(2), Mega2560(2), Leonardo(3), microbit(P0).
#endif
/**
Set the threshold of interrupt source 1 interrupt
threshold:Threshold(g)
*/
acce.setInt1Th(/*Threshold = */6);//Unit: g
/*!
Enable interrupt
Interrupt pin selection:
eINT1 = 0,/<int1 >/
eINT2,/<int2>/
Interrupt event selection:
eXLowerThanTh ,/<The acceleration in the x direction is less than the threshold>/
eXHigherThanTh ,/<The acceleration in the x direction is greater than the threshold>/
eYLowerThanTh,/<The acceleration in the y direction is less than the threshold>/
eYHigherThanTh,/<The acceleration in the y direction is greater than the threshold>/
eZLowerThanTh,/<The acceleration in the z direction is less than the threshold>/
eZHigherThanTh,/<The acceleration in the z direction is greater than the threshold>/
*/
acce.enableInterruptEvent(/*int pin*/DFRobot_LIS::eINT1,/*interrupt event = */DFRobot_LIS::eZHigherThanTh);
delay(1000);
}
void loop(void){
//Get the acceleration in the three directions of xyz
//The mearsurement range is ±100g or ±200g, set by setRange() function.
Serial.print("Acceleration x: ");
Serial.print(acce.readAccX());
Serial.print(" g \ty: ");
Serial.print(acce.readAccY());
Serial.print(" g \tz: ");
Serial.print(acce.readAccZ());
Serial.println(" g");
delay(300);
//The interrupt flag is set
if(intFlag == true){
//Check whether the interrupt event is generated in interrupt 1
if(acce.getInt1Event(DFRobot_LIS::eYHigherThanTh)){
Serial.println("The acceleration in the y direction is greater than the threshold");
}
if(acce.getInt1Event(DFRobot_LIS::eZHigherThanTh)){
Serial.println("The acceleration in the z direction is greater than the threshold");
}
if(acce.getInt1Event(DFRobot_LIS::eXHigherThanTh)){
Serial.println("The acceleration in the x direction is greater than the threshold");
}
intFlag = false;
}
}
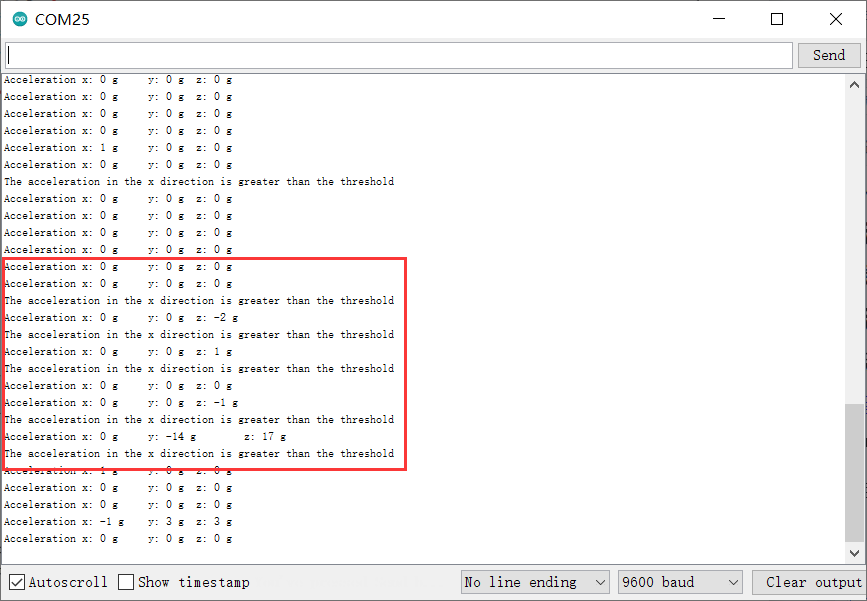
Result
Additional Information
- Program Burning steps: Select interrupt.ino and burn the program.
Was this article helpful?