Reference
Library
- DFRobot_C4001 library, Click to download the DFRobot_C4001 library.
Communication Protocol Description
- The sensor supports UART and I2C communication. For UART: Baud rate is 9600. Wiring for different boards:
- Arduino UNO: RX -> D5, TX -> D4 (using SoftwareSerial)
- ESP32: RX -> D2, TX -> D3 (using Serial1)
- Leonardo/Mega2560/M0: RX -> Serial1 TX1, TX -> Serial1 RX1
- For I2C: Default I2C address is 0x2A, alternative address is 0x2B.
Principle
The C4001(25m) millimeter-wave presence sensor utilizes a wavelength signal of 24GHz. It has a detection range of 100° horizontally, with a presence detection range of 16 meters and a motion detection and distance measurement range of 25 meters.
Human detection
Compared to other types of presence sensors such as infrared sensors and ultrasonic sensors, the C4001(25m) millimeter-wave presence sensor has the advantage of being able to detect both static and moving objects. It also has a relatively strong anti-interference ability, making it less susceptible to factors such as temperature changes, variations in ambient light, and environmental noise. Whether a person is sitting, sleeping, or in motion, the sensor can quickly and sensitively detect their presence.
| Millimeter-wave Presence Sensor | Infrared Sensor | |
|---|---|---|
| Sensing Principle | TOF radar principle + Doppler radar sensing principle (active detection) | Pyroelectric infrared sensing principle (passive radiation) |
| Motion Sensitivity | Can detect presence, slight movement, and motion of human body | Can only detect motion and close-range slight movement of human body |
| Sensing Range | Can be adjusted to different sensing distances | Sensing range cannot be adjusted |
| Environmental Temperature Impact | Not affected by environmental temperature | Sensitivity decreases when temperature is close to human body temperature |
| Application Environment | Not affected by heat sources, light sources, air flow | Susceptible to heat sources and air flow |
| Penetration Ability | Can penetrate fabrics, plastics, glass, and other insulating materials | Can only penetrate some transparent plastics |
| Distance Measurement Support | Yes | No |
Distance and velocity detection
The C4001(25m) millimeter-wave presence sensor utilizes Frequency Modulated Continuous Wave (FMCW) modulation for distance and speed measurement. It has a maximum measurement range of 25 meters for distance and a speed measurement range of 0.1 to 10 meters per second.
FMCW is a radar system based on Frequency Modulated Continuous Wave. Unlike traditional pulse radar, FMCW radar continuously emits a series of continuous wave signals with gradually changing frequencies while simultaneously receiving the reflected signals. By analyzing the received signals, measurements of parameters such as distance, velocity, and angle can be achieved.
Compared to traditional pulse radar technology, FMCW radar can continuously measure the distance of objects. By utilizing the Doppler effect, it can also obtain velocity information of the target objects. This makes it suitable for applications that require monitoring the motion status of target objects. Additionally, FMCW radar can achieve continuous frequency scanning, providing higher measurement resolution. Since it doesn't need to wait for the echo signal to return, it is suitable for applications that require real-time monitoring and tracking of target objects.
What is a millimeter-wave radar sensor?
Millimeter-wave radar technology is a non-contact sensing technology used to detect objects and provide information about their distance, velocity, and angle (in the case of humans, for example). The signals emitted by millimeter-wave sensors fall within the high-frequency spectrum with wavelengths between 24GHz and 300 GHz, also known as the millimeter (mm) range.
Other Supplementary Information
Installation Method
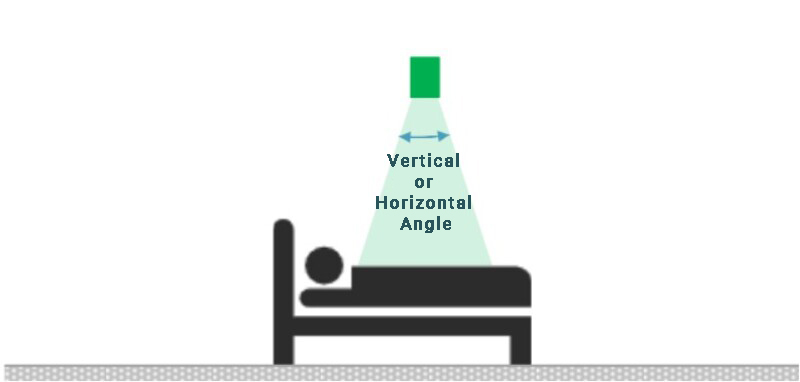
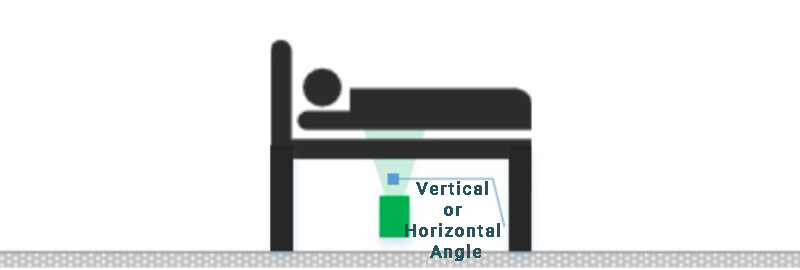
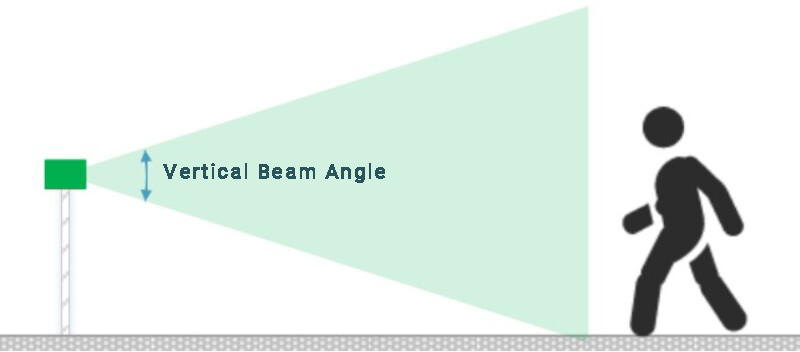
The millimeter-wave human body sensor is sensitive to the installation method, and improper installation can affect the performance and functionality of the sensor. The commonly used installation methods for this module include top installation, bottom installation, horizontal installation, and downward tilted installation.
Top Installation
Bottom Installation
Horizontal Installation
More Documents
Was this article helpful?