Example Code for Arduino-Distance and Speed Acquisition
This article provides a comprehensive guide on using Arduino and the C4001 mmWave sensor to measure distance and speed. It includes hardware and software preparation steps, wiring instructions, and a detailed example code for radar measurement. Readers will learn how to configure the sensor's detection thresholds, set sensor mode, and interpret output data, enabling precise distance and speed acquisition for various applications.
Hardware Preparation
Software Preparation
- Arduino IDE, Click to download Arduino IDE
- DFRobot_C4001 library, Click to download the DFRobot_C4001 library.
Wiring Diagram
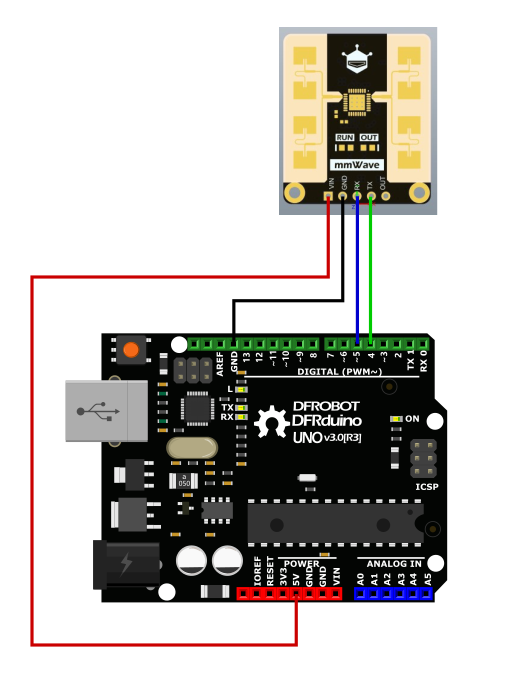
| MmWave | Arduino Uno |
|---|---|
| VIN | 5V |
| GND | GND |
| RX | D5 |
| TX | D4 |
Sample Code
Please copy the following code and upload it to your Arduino IDE.
/*!
* @file mRangeVelocity.ino
* @brief radar measurement demo
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author ZhixinLiu([email protected])
* @version V1.0
* @date 2024-02-02
* @url https://github.com/dfrobot/DFRobot_C4001
*/
#include "DFRobot_C4001.h"
//#define I2C_COMMUNICATION //use I2C for communication, but use the serial port for communication if the line of codes were masked
#ifdef I2C_COMMUNICATION
/*
* DEVICE_ADDR_0 = 0x2A default iic_address
* DEVICE_ADDR_1 = 0x2B
*/
DFRobot_C4001_I2C radar(&Wire, DEVICE_ADDR_0);
#else
/* ---------------------------------------------------------------------------------------------------------------------
* board | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit | m0 |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X | vcc |
* GND | GND | GND | GND | GND | GND | X | gnd |
* RX | TX | Serial1 TX1 | 5 | 5/D6 | D2 | X | tx1 |
* TX | RX | Serial1 RX1 | 4 | 4/D7 | D3 | X | rx1 |
* ----------------------------------------------------------------------------------------------------------------------*/
/* Baud rate cannot be changed */
#if defined(ARDUINO_AVR_UNO) || defined(ESP8266)
SoftwareSerial mySerial(4, 5);
DFRobot_C4001_UART radar(&mySerial, 9600);
#elif defined(ESP32)
DFRobot_C4001_UART radar(&Serial1, 9600, /*rx*/ D2, /*tx*/ D3);
#else
DFRobot_C4001_UART radar(&Serial1, 9600);
#endif
#endif
void setup() {
Serial.begin(115200);
while (!Serial)
;
while (!radar.begin()) {
Serial.println("NO Deivces !");
delay(1000);
}
Serial.println("Device connected!");
// speed Mode
radar.setSensorMode(eSpeedMode);
sSensorStatus_t data;
data = radar.getStatus();
// 0 stop 1 start
Serial.print("work status = ");
Serial.println(data.workStatus);
// 0 is exist 1 speed
Serial.print("work mode = ");
Serial.println(data.workMode);
// 0 no init 1 init success
Serial.print("init status = ");
Serial.println(data.initStatus);
Serial.println();
/*
* min Detection range Minimum distance, unit cm, range 0.3~20m (30~2500), not exceeding max, otherwise the function is abnormal.
* max Detection range Maximum distance, unit cm, range 2.4~20m (240~2500)
* thres Target detection threshold, dimensionless unit 0.1, range 0~6553.5 (0~65535)
*/
if (radar.setDetectThres(/*min*/ 11, /*max*/ 1200, /*thres*/ 10)) {
Serial.println("set detect threshold successfully");
}
// set Fretting Detection
radar.setFrettingDetection(eON);
// get confige params
Serial.print("min range = ");
Serial.println(radar.getTMinRange());
Serial.print("max range = ");
Serial.println(radar.getTMaxRange());
Serial.print("threshold range = ");
Serial.println(radar.getThresRange());
Serial.print("fretting detection = ");
Serial.println(radar.getFrettingDetection());
}
void loop() {
Serial.print("target number = ");
Serial.println(radar.getTargetNumber()); // must exist
Serial.print("target Speed = ");
Serial.print(radar.getTargetSpeed());
Serial.println(" m/s");
Serial.print("target range = ");
Serial.print(radar.getTargetRange());
Serial.println(" m");
Serial.print("target energy = ");
Serial.println(radar.getTargetEnergy());
Serial.println();
delay(100);
}
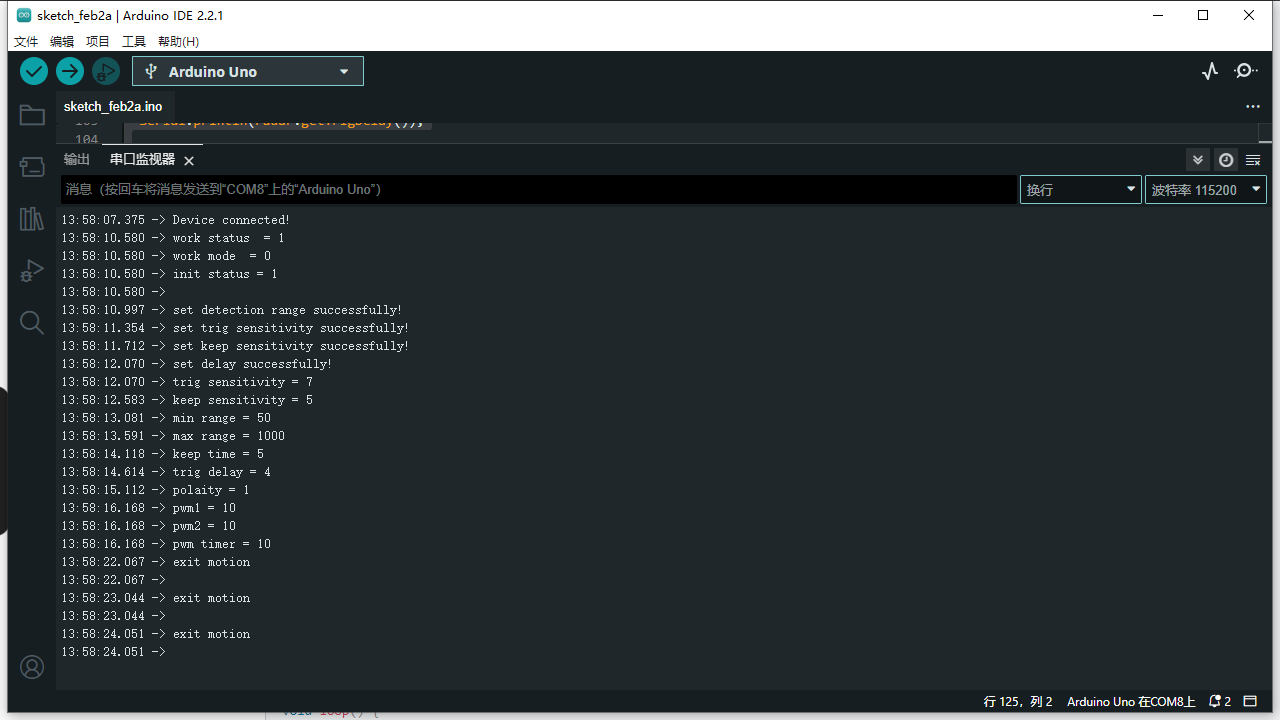
Result
When the sensor detects someone, it outputs information such as distance and speed.
Was this article helpful?