Reference
Library
- DFRobot_BME68x library for Arduino.
- BME AI-Studio software for AI function of BME688.
- BSEC2-Arduino library for AI function of BME688.
API Description
-
Create a bme object and write to the I2C address
DFRobot_BME68x_I2C bme(0x77); -
Initializing the BME68x and Libraries
begin(); -
Start data conversion
startConvert(); -
Read converted data
update(); -
Supports IAQ reading
supportIAQ(); -
Read-converted data with IAQ
iaqUpdate(); -
Queries whether the IAQ conversion is complete, returns 1 if complete, 0 if not.
isIAQReady(); -
Get the temperature in °C, data with two decimal points
readTemperature(); -
Get the pressure in pa, data with two decimal points
readPressure(); -
Get the humidity in %rh with two decimal places.
readHumidity(); -
Get the resistance value of the gas resistor in ohm, data with two decimal points
readGasResistance(); -
Get the altitude in m with two decimal places.
readAltitude(); -
Acquisition of sea level barometric pressure reference, incoming elevation
readSeaLevel(float altitude); -
Acquisition of corrected elevations to be passed into the sea level reference
readCalibratedAltitude(float seaLevel); -
Set the target temperature of the heating layer (°C) and the heating duration (ms). Temperature range 200~400°C
setGasHeater(uint16_t heaterTemp, uint16_t heaterTime);
Principle
DFRobot Gravity BME688 Environmental Sensor is a highly integrated MEMS environmental sensor capable of comprehensively measuring environmental parameters such as temperature, humidity, barometric pressure and VOC index (volatile organic compounds). The software and hardware dimensions are fully compatible with the formal BME680, making it a drop-in replacement for the BME680 in existing systems without the need for any adjustments, while the BME688 improves the accuracy of the temperature measurements and skeletonizes the periphery of the IC on the circuit board to minimize the effect of heat from external components on the measurements.
Another major improvement of the BME688 is the introduction of a “heating layer” on the bottom of the chip. While conventional VOC sensors are susceptible to ambient temperature interference, leading to measurement errors, the BME688's heating layer allows the user to precisely control the sensor's temperature, thus minimizing the impact of ambient temperature on VOC measurements. With this feature, users can also adjust the temperature of the heating layer to collect data on the response of specific composite gases at different temperatures for in-depth analysis in conjunction with AI technology.
If you hope to use the AI function of the BME688 for gas analysis, you will need to use BME AI-Studio software and BSEC2-Arduino library released by Bosch for secondary development
Other Supplementary Information
IAQ(Indoor Air Quality) Comparison Table

Wiring Diagram
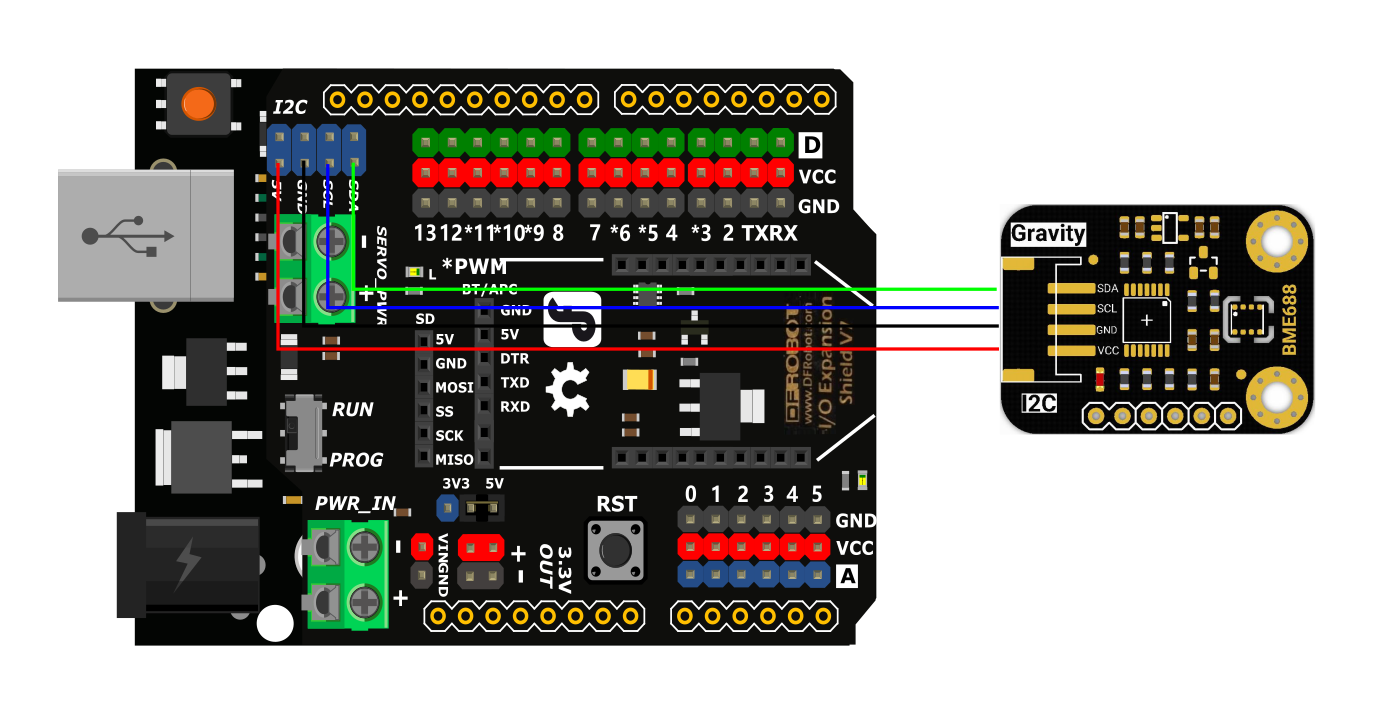
- This product supports both I2C and SPI interfaces. Select the appropriate wiring method based on your chosen communication interface.
- The I2C interface is recommended for plug-and-play usage and easier integration.
- When using the SPI interface, the module must be powered by 3.3V.
I2C Diagram
Make sure to follow the correct wiring sequence: connect VCC to 5V and GND to ground.
SPI diagram
Be sure to pay attention to the wire sequence, VCC to 3.3V, GND grounded
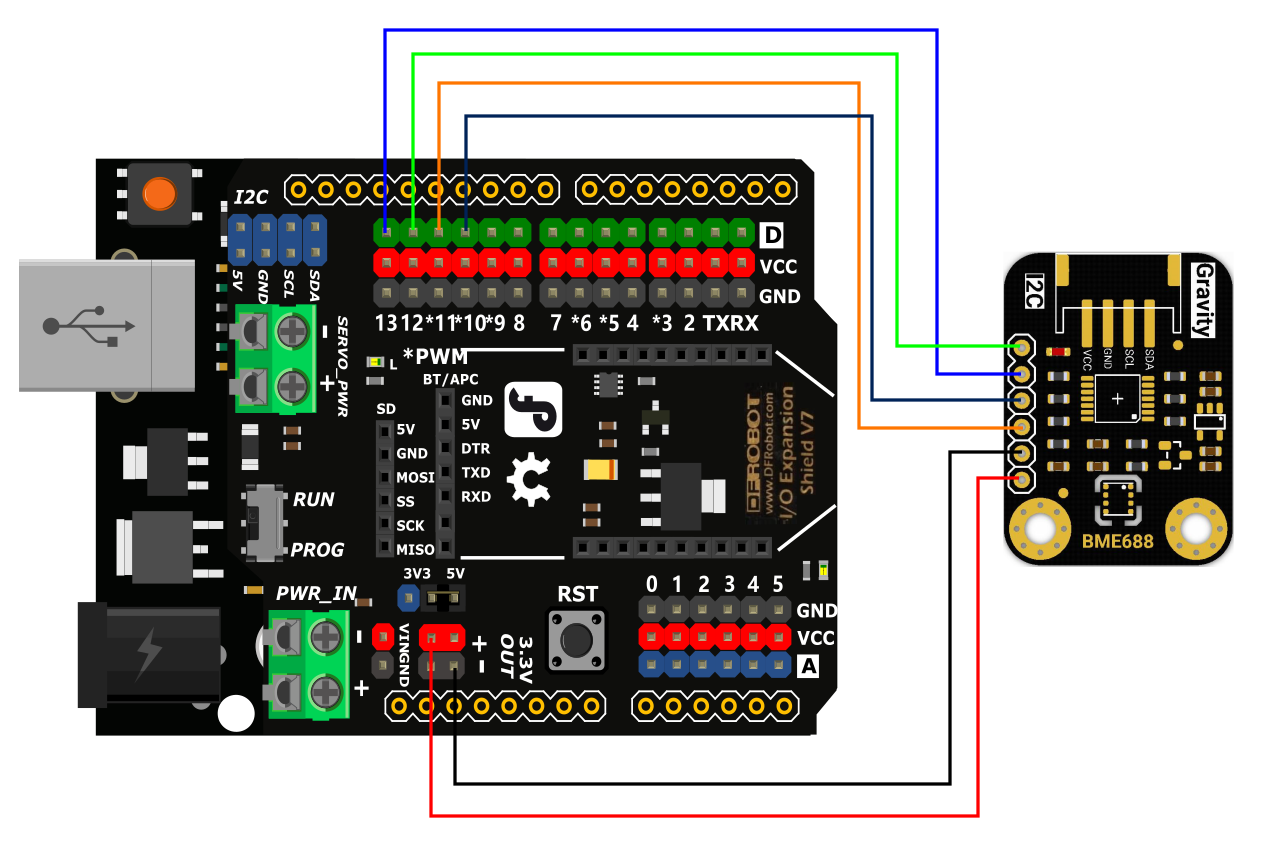
For SPI interface sample code, please go to the library file to find DFRobot_BME68x_SPI.ino file
Was this article helpful?