Example Code for Arduino-9-in-1 Weather Station Monitoring
Collect ultrasonic wind speed and direction values, temperature values, humidity values, atmospheric pressure values, light values, noise values, PM2.5, PM10 and print them through the serial port.
Hardware Preparation
- DFRduino UNO R3 (or similar) x 1
- Gravity: Active Isolated RS485 to UART Signal Adapter Module x 1
- RS485 9-in-1 Weather Station Sensor x 1
Software Preparation
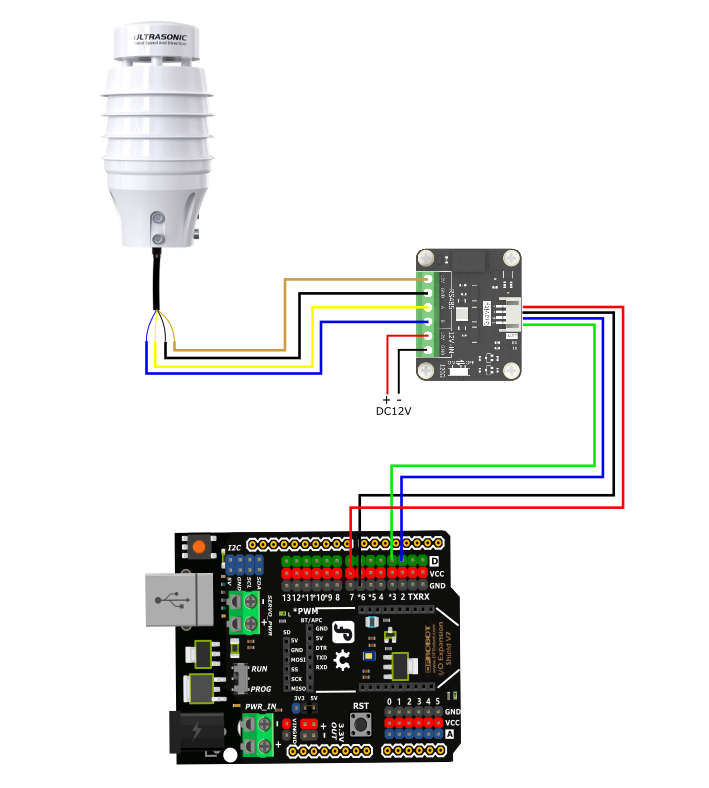
Wiring Diagram
If the power of the RS485 device is small and the required current is less than 12V-160mA, the RS485 to UART signal conversion module does not require a 12V external power supply, making wiring more convenient.
| Sensor | RS485 to UART Module |
|---|---|
| Brown wire | 12V |
| Black wire | GND |
| Yellow wire | A |
| Blue wire | B |
| RS485 to UART Module | Arduino UNO | Mega2560 | ESP32 |
|---|---|---|---|
| Red wire(+) | 5V | 5V | 5V |
| Black wire(-) | GND | GND | GND |
| Blue wire (RX) | D2 | D19 | D16 |
| Green wire (TX) | D3 | D18 | D17 |
Other Preparation Work
- Ensure the power supply of the RS485 device meets the requirements and the wiring is correct.
- This sample code is compatible with UNO R3, Mega2560, and ESP32 development boards.
Sample Code
// ---------------- Cross-Platform Serial Configuration ----------------
#if defined(__AVR_ATmega2560__)
// Arduino Mega 2560: Use hardware serial port Serial1
// Sensor TX connects to Mega Pin 18
// Sensor RX connects to Mega Pin 19
#define sensorSerial Serial1
#elif defined(ESP32)
// ESP32: Manually instantiate hardware serial port; compatible with all models including C3/S2/S3/WROOM, etc.
#include <HardwareSerial.h>
HardwareSerial mySensorSerial(1); // Consistently use internal UART 1
#define sensorSerial mySensorSerial
#else
// Arduino UNO: Software serial port
// Sensor TX connects to UNO Pin 3
// Sensor RX connects to UNO Pin 2
#include <SoftwareSerial.h>
SoftwareSerial mySerial(2, 3);
#define sensorSerial mySerial
#endif
// ------------------------------------------------
uint8_t Com[8] = { 0x01, 0x03, 0x01, 0xF4, 0x00, 0x04, 0x04, 0x07 }; //Wind speed and direction
uint8_t Com1[8] = { 0x01, 0x03, 0x01, 0xF8, 0x00, 0x03, 0x85, 0xC6 }; //Temperature, humidity, noise
uint8_t Com2[8] = { 0x01, 0x03, 0x01, 0xFE, 0x00, 0x02, 0xA4, 0x07 }; //Light
uint8_t Com3[8] = { 0x01, 0x03, 0x01, 0xFB, 0x00, 0x03, 0x75, 0xC6 }; //PM2.5, PM10, atmospheric pressure
float tem, hum, ws, ap, db;
int wd, wdangle, pm2_5, pm10;
uint32_t lux;
void setup() {
Serial.begin(115200);
// Print a line of plain English text for testing. If this line appears clearly and without garbled characters,
// it indicates that communication between the computer and the development board is fully functional! Serial.println("");
Serial.println("--- System Start ---");
// Initialize the sensor serial port for different development boards
// (The sensor's baud rate must remain at 4800—do not change it)
#if defined(ESP32)
// ESP32 specific pins: RX connected to 16, TX connected to 17;
// pins can be customized based on the specific board model
sensorSerial.begin(4800, SERIAL_8N1, 16, 17);
#else
// UNO and Mega 2560
sensorSerial.begin(4800);
#endif
}
void loop() {
readHumiture_Noise();
Serial.print("TEM = ");
Serial.print(tem, 1);
Serial.print("°C ");
Serial.print("HUM = ");
Serial.print(hum, 1);
Serial.print("%RH ");
Serial.print("dbValue = ");
Serial.print(db, 1);
Serial.print("dB ");
readLight();
Serial.print("Lux = ");
Serial.print(lux);
Serial.println("(lux) ");
readPM2_5_10_AtmosphericPressure();
Serial.print("PM2.5 = ");
Serial.print(pm2_5);
Serial.print("ug/m³ ");
Serial.print("PM10 = ");
Serial.print(pm10);
Serial.print("ug/m³ ");
Serial.print("AP = ");
Serial.print(ap, 1);
Serial.println("kPa ");
readWindSpeed_WindDirection();
Serial.print("Wind Speed = ");
Serial.print(ws, 1);
Serial.print("m/s ");
Serial.print("Wind Direction = ");
Serial.print(wd);
Serial.print(" WindDirection_Angle = ");
Serial.print(wdangle);
Serial.println("° ");
Serial.println(" ");
delay(2000);
}
void readWindSpeed_WindDirection(void) {
uint8_t Data[12] = { 0 };
uint8_t ch = 0;
bool flag = 1;
long timeStart = millis();
long timeStart1 = 0;
while (flag) {
if ((millis() - timeStart1) > 100) {
while (sensorSerial.available() > 0) {
sensorSerial.read();
}
sensorSerial.write(Com, 8);
timeStart1 = millis();
}
if ((millis() - timeStart) > 1000) {
Serial.println("Time out");
return;
}
if (readN(&ch, 1) == 1) {
if (ch == 0x01) {
Data[0] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x03) {
Data[1] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x08) {
Data[2] = ch;
if (readN(&Data[3], 10) == 10) {
if (CRC16_2(Data, 11) == (Data[11] * 256 + Data[12])) {
ws = (Data[3] * 256 + Data[4]) / 100.00;
wd = Data[7] * 256 + Data[8];
wdangle = Data[9] * 256 + Data[10];
flag = 0;
}
}
}
}
}
}
}
}
}
}
void readHumiture_Noise(void) {
uint8_t Data[12] = { 0 };
uint8_t ch = 0;
bool flag = 1;
long timeStart = millis();
long timeStart1 = 0;
while (flag) {
if ((millis() - timeStart1) > 100) {
while (sensorSerial.available() > 0) {
sensorSerial.read();
}
sensorSerial.write(Com1, 8);
timeStart1 = millis();
}
if ((millis() - timeStart) > 1000) {
Serial.println("Time out1");
return;
}
if (readN(&ch, 1) == 1) {
if (ch == 0x01) {
Data[0] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x03) {
Data[1] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x06) {
Data[2] = ch;
if (readN(&Data[3], 8) == 8) {
if (CRC16_2(Data, 9) == (Data[9] * 256 + Data[10])) {
hum = (Data[3] * 256 + Data[4]) / 10.00;
tem = (Data[5] * 256 + Data[6]) / 10.00;
db = (Data[7] * 256 + Data[8]) / 10.00;
flag = 0;
}
}
}
}
}
}
}
}
}
}
void readLight(void) {
uint8_t Data[15] = { 0 };
uint8_t ch = 0;
long timeStart = millis();
long timeStart1 = 0;
bool flag = 1;
while (flag) {
if ((millis() - timeStart1) > 100) {
while (sensorSerial.available() > 0) {
sensorSerial.read();
}
sensorSerial.write(Com2, 8);
timeStart1 = millis();
}
if ((millis() - timeStart) > 1000) {
Serial.println("Time out2");
return;
}
if (readN(&ch, 1) == 1) {
if (ch == 0x01) {
Data[0] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x03) {
Data[1] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x04) {
Data[2] = ch;
if (readN(&Data[3], 6) == 6) {
if (CRC16_2(Data, 7) == (Data[7] * 256 + Data[8])) {
lux = Data[3] << 24 | Data[4] << 16 | Data[5] << 8 | Data[6];
flag = 0;
}
}
}
}
}
}
}
}
}
}
void readPM2_5_10_AtmosphericPressure(void) {
uint8_t Data[12] = { 0 };
uint8_t ch = 0;
long timeStart = millis();
long timeStart1 = 0;
bool flag = 1;
while (flag) {
if ((millis() - timeStart1) > 100) {
while (sensorSerial.available() > 0) {
sensorSerial.read();
}
sensorSerial.write(Com3, 8);
timeStart1 = millis();
}
if ((millis() - timeStart) > 1000) {
Serial.println("Time out3");
return;
}
if (readN(&ch, 1) == 1) {
if (ch == 0x01) {
Data[0] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x03) {
Data[1] = ch;
if (readN(&ch, 1) == 1) {
if (ch == 0x06) {
Data[2] = ch;
if (readN(&Data[3], 8) == 8) {
if (CRC16_2(Data, 9) == (Data[9] * 256 + Data[10])) {
pm2_5 = Data[3] * 256 + Data[4];
pm10 = Data[5] * 256 + Data[6];
ap = (Data[7] * 256 + Data[8]) / 10.00;
flag = 0;
}
}
}
}
}
}
}
}
}
}
uint8_t readN(uint8_t *buf, size_t len) {
size_t offset = 0, left = len;
int16_t Tineout = 500;
uint8_t *buffer = buf;
long curr = millis();
while (left) {
if (sensorSerial.available()) {
buffer[offset] = sensorSerial.read();
offset++;
left--;
}
if (millis() - curr > Tineout) {
break;
}
}
return offset;
}
unsigned int CRC16_2(unsigned char *buf, int len) {
unsigned int crc = 0xFFFF;
for (int pos = 0; pos < len; pos++) {
crc ^= (unsigned int)buf[pos];
for (int i = 8; i != 0; i--) {
if ((crc & 0x0001) != 0) {
crc >>= 1;
crc ^= 0xA001;
} else {
crc >>= 1;
}
}
}
crc = ((crc & 0x00ff) << 8) | ((crc & 0xff00) >> 8);
return crc;
}
Result
Serial monitor baud rate selection: 115200,Print the collected ultrasonic wind speed and direction values, temperature values, humidity values, atmospheric pressure values, light values, noise values, PM2.5, PM10.
Was this article helpful?