Example Code for Arduino-Get GNSS Position
A detailed tutorial on obtaining GNSS positioning using Arduino, including hardware setup, software requirements, and a sample code walkthrough for accurate location data retrieval.
Hardware Preparation
Software Preparation
- Arduino IDE
- Download and install DFRobot_GNSS and RTC library
Wiring Diagram

Sample Code
/*!
* @file getGNSS.ino
* @brief Get gnss simple data
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author [qsjhyy]([email protected])
* @version V1.0
* @date 2022-08-30
* @url https://github.com/DFRobot/DFRobot_GNSSAndRTC
*/
#include "DFRobot_GNSSAndRTC.h"
#define I2C_COMMUNICATION //use I2C for communication, but use the serial port for communication if the line of codes were masked
#ifdef I2C_COMMUNICATION
DFRobot_GNSSAndRTC_I2C gnss(&Wire, MODULE_I2C_ADDRESS);
#else
/* ---------------------------------------------------------------------------------------------------------------------
* board | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit | m0 |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X | vcc |
* GND | GND | GND | GND | GND | GND | X | gnd |
* RX | TX | Serial1 TX1 | 5 | 5/D6 | D2 | X | tx1 |
* TX | RX | Serial1 RX1 | 4 | 4/D7 | D3 | X | rx1 |
* ----------------------------------------------------------------------------------------------------------------------*/
/* Baud rate cannot be changed */
#if defined(ARDUINO_AVR_UNO) || defined(ESP8266)
SoftwareSerial mySerial(4, 5);
DFRobot_GNSSAndRTC_UART gnss(&mySerial, UART_BAUDRATE);
#elif defined(ESP32)
DFRobot_GNSSAndRTC_UART gnss(&Serial1, UART_BAUDRATE,/*rx*/D2,/*tx*/D3);
#else
DFRobot_GNSSAndRTC_UART gnss(&Serial1, UART_BAUDRATE);
#endif
#endif
void setup()
{
Serial.begin(115200);
while (!gnss.begin()) {
Serial.println("NO Deivces !");
delay(1000);
}
gnss.enablePower(); // Enable gnss power
/** Set GNSS to be used
* eGPS use gps
* eBeiDou use beidou
* eGPS_BeiDou use gps + beidou
* eGLONASS use glonass
* eGPS_GLONASS use gps + glonass
* eBeiDou_GLONASS use beidou +glonass
* eGPS_BeiDou_GLONASS use gps + beidou + glonass
*/
gnss.setGnss(gnss.eGPS_BeiDou_GLONASS);
// gnss.disablePower(); // Disable GNSS, the data will not be refreshed after disabling
}
void loop()
{
DFRobot_GNSSAndRTC::sTim_t utc = gnss.getUTC();
DFRobot_GNSSAndRTC::sTim_t date = gnss.getDate();
DFRobot_GNSSAndRTC::sLonLat_t lat = gnss.getLat();
DFRobot_GNSSAndRTC::sLonLat_t lon = gnss.getLon();
double high = gnss.getAlt();
uint8_t starUserd = gnss.getNumSatUsed();
double sog = gnss.getSog();
double cog = gnss.getCog();
Serial.println("");
Serial.print(date.year);
Serial.print("/");
Serial.print(date.month);
Serial.print("/");
Serial.print(date.date);
Serial.print("/");
Serial.print(utc.hour);
Serial.print(":");
Serial.print(utc.minute);
Serial.print(":");
Serial.print(utc.second);
Serial.println();
Serial.println((char)lat.latDirection);
Serial.println((char)lon.lonDirection);
// Serial.print("lat DDMM.MMMMM = ");
// Serial.println(lat.latitude, 5);
// Serial.print("lon DDDMM.MMMMM = ");
// Serial.println(lon.lonitude, 5);
Serial.print("lat degree = ");
Serial.println(lat.latitudeDegree, 6);
Serial.print("lon degree = ");
Serial.println(lon.lonitudeDegree, 6);
Serial.print("star userd = ");
Serial.println(starUserd);
Serial.print("alt high = ");
Serial.println(high);
Serial.print("sog = ");
Serial.println(sog);
Serial.print("cog = ");
Serial.println(cog);
Serial.print("gnss mode = ");
Serial.println(gnss.getGnssMode());
delay(1000);
}
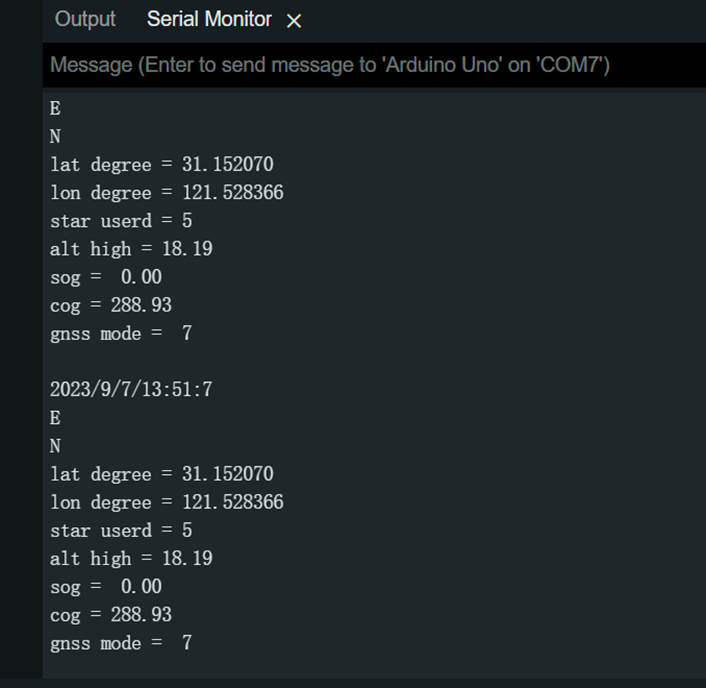
Result
Was this article helpful?