Example Code for Arduino-External Interrupt Function
Last revision 2026/01/19
This example demonstrates interrupt detection. An interrupt is triggered when acceleration on the selected axis exceeds or falls below the set threshold, and the signal can be read from INT1/INT2.
Hardware Preparation
- DFRduino UNO R3 (or similar) x 1
- LIS331HH Triple Axis Accelerometer (Breakout Version) x1
- Jumper wires
Software Preparation
- Arduino IDE
- Download and install the LIS Series Library and Sample Code. (About how to install the library?)
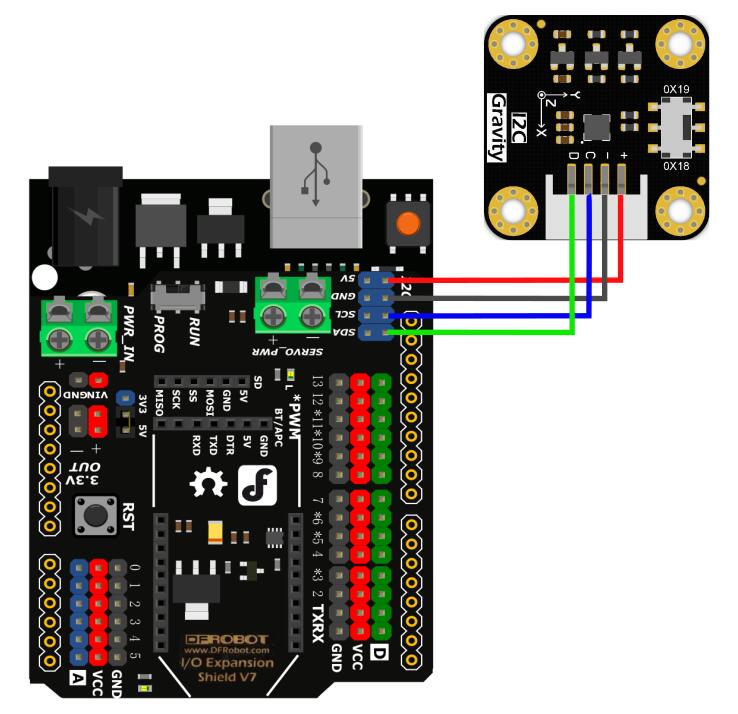
Wiring Diagram
Other Preparation Work
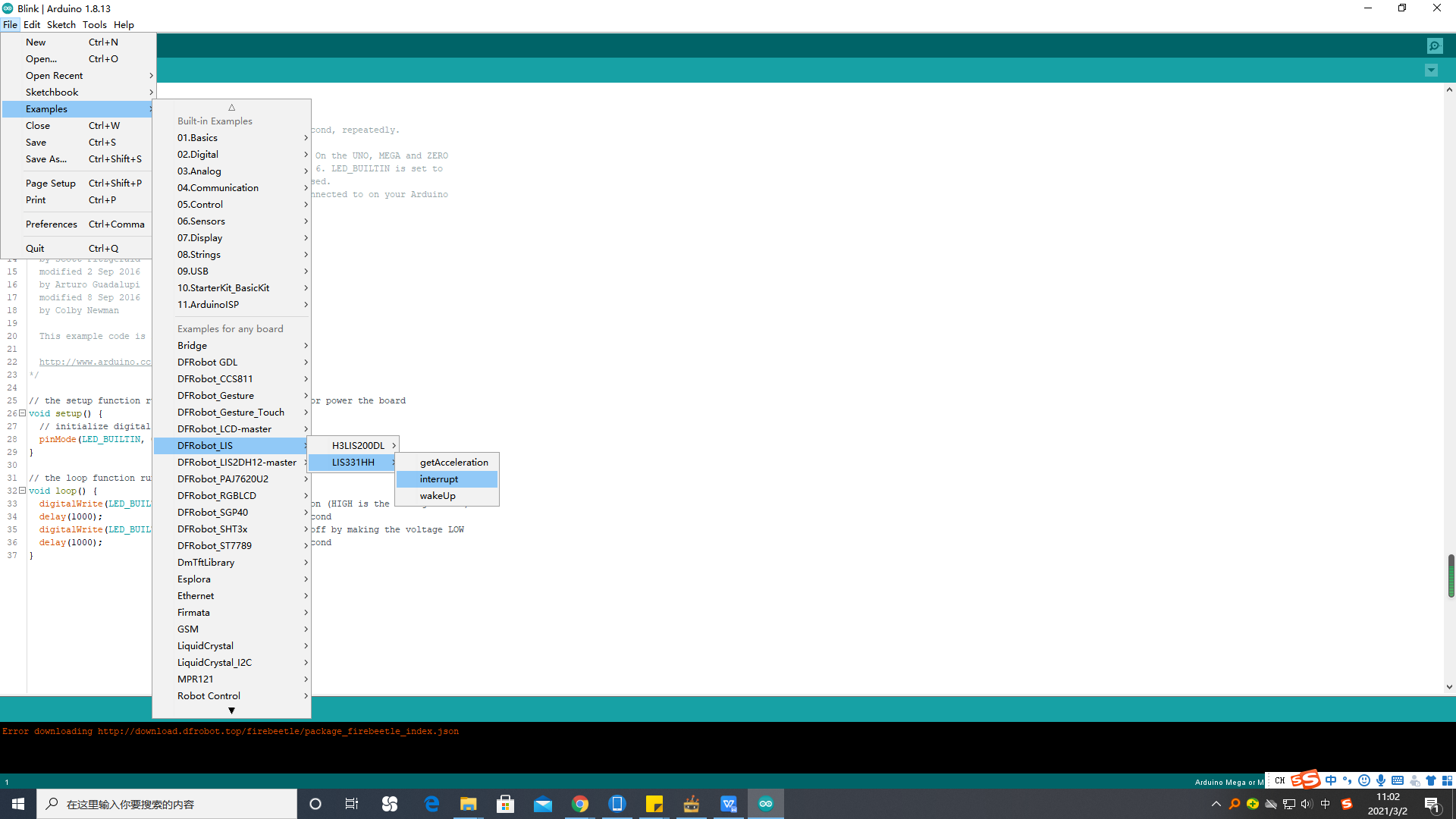
- Select interrupt.ino from the library examples.
- Connect the int1/int2 pin of the module to the interrupt pin of the motherboard (e.g., UNO pin 2).
Sample Code
/**!
* @file interrupt.ino
* @brief Interrupt detection
* @n In this example, the enable eZHigherThanTh interrupt event means when the acceleration in the Z direction exceeds the
* @n the threshold set by the program, the interrupt level can be detected on the interrupt pin int1/int2 we set, and the level change
* @n on the interrupt pin can be used to determine whether the interrupt occurs. The following are the 6 settable interrupt events:
* @n eXHigherThanTh, eXLowerThanTh, eYHigherThanTh, eYLowerThanTh, eZHigherThanTh,eZLowerThanTh.
* @n For a detailed explanation of each of them, please look up the comments of the enableInterruptEvent() function.
* @n This example needs to connect the int2/int1 pin of the module to the interrupt pin of the motherboard. Default UNO(2),
* @n Mega2560(2), Leonardo(3), microbit(P0),FireBeetle-ESP8266(D6),FireBeetle-ESP32((D6),FireBeetle-M0(6)
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli]([email protected])
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS331HH_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS331HH_I2C acce(&Wire,0x18);
DFRobot_LIS331HH_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS331HH_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS331HH_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS331HH_CS 3
#elif (defined NRF5)
#define LIS331HH_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS331HH_SPI acce(/*cs = */LIS331HH_CS,&SPI);
//DFRobot_LIS331HH_SPI acce(/*cs = */LIS331HH_CS);
volatile uint8_t intFlag = 0;
void interEvent(){
intFlag = 1;
}
void setup(void){
Serial.begin(9600);
//Chip initialization
while(!acce.begin()){
delay(1000);
Serial.println("Initialization failed, please check the connection and I2C address setting");
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
/**
set range:Range(g)
eLis331hh_6g = 6,/<±6g>/
eLis331hh_12g = 12,/<±12g>/
eLis331hh_24g = 24/<±24g>/
*/
acce.setRange(/*range = */DFRobot_LIS::eLis331hh_6g);
/**
Set data measurement rate:
ePowerDown_0HZ = 0,
eLowPower_halfHZ,
eLowPower_1HZ,
eLowPower_2HZ,
eLowPower_5HZ,
eLowPower_10HZ,
eNormal_50HZ,
eNormal_100HZ,
eNormal_400HZ,
eNormal_1000HZ,
*/
acce.setAcquireRate(/*rate = */DFRobot_LIS::eLowPower_2HZ);
#if defined(ESP32) || defined(ESP8266)
//The D6 pin is used as the interrupt pin by default, and other non-conflicting pins can also be selected as the external interrupt pin.
attachInterrupt(digitalPinToInterrupt(D6)/*Query the interrupt number of the D6 pin*/,interEvent,CHANGE);
#elif defined(ARDUINO_SAM_ZERO)
//The pin 5 is used as the interrupt pin by default, and other non-conflicting pins can also be selected as the external interrupt pin.
attachInterrupt(digitalPinToInterrupt(5)/*Query the interrupt number of the pin 5*/,interEvent,CHANGE);
#else
/* The Correspondence Table of AVR Series Arduino Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------
* | | DigitalPin | 2 | 3 | |
* | Uno, Nano, Mini, other 328-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | |
* |-------------------------------------------------------------------------------------|
* | | Pin | 2 | 3 | 21 | 20 | 19 | 18 |
* | Mega2560 |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | 5 |
* |-------------------------------------------------------------------------------------|
* | | Pin | 3 | 2 | 0 | 1 | 7 | |
* | Leonardo, other 32u4-based |--------------------------------------------|
* | | Interrupt No | 0 | 1 | 2 | 3 | 4 | |
* |--------------------------------------------------------------------------------------
*/
/* The Correspondence Table of micro:bit Interrupt Pins And Terminal Numbers
* ---------------------------------------------------------------------------------------------------------------------------------------------
* | micro:bit | DigitalPin |P0-P20 can be used as an external interrupt |
* | (When using as an external interrupt, |---------------------------------------------------------------------------------------------|
* |no need to set it to input mode with pinMode)|Interrupt No|Interrupt number is a pin digital value, such as P0 interrupt number 0, P1 is 1 |
* |-------------------------------------------------------------------------------------------------------------------------------------------|
*/
attachInterrupt(/*Interrupt No*/0,interEvent,CHANGE);//Open the external interrupt 0, connect INT1/2 to the digital pin of the main control:
//UNO(2), Mega2560(2), Leonardo(3), microbit(P0).
#endif
/**
Set the threshold of interrupt source 1 interrupt
threshold:Threshold(g)
*/
acce.setInt1Th(/*Threshold = */2);
/*!
Enable interrupt
Interrupt pin selection:
eINT1 = 0,/<int1 >/
eINT2,/<int2>/
Interrupt event selection:
eXLowerThanTh ,/<The acceleration in the x direction is less than the threshold>/
eXHigherThanTh ,/<The acceleration in the x direction is greater than the threshold>/
eYLowerThanTh,/<The acceleration in the y direction is less than the threshold>/
eYHigherThanTh,/<The acceleration in the y direction is greater than the threshold>/
eZLowerThanTh,/<The acceleration in the z direction is less than the threshold>/
eZHigherThanTh,/<The acceleration in the z direction is greater than the threshold>/
*/
acce.enableInterruptEvent(/*int pin*/DFRobot_LIS::eINT1,/*interrupt = */DFRobot_LIS::eZHigherThanTh);
delay(1000);
}
void loop(void){
//Get the acceleration in the three directions of xyz
//The mearsurement range is ±6g, ±12g or ±24g, set by the setRange() function
Serial.print("Acceleration x: ");
Serial.print(acce.readAccX());
Serial.print(" mg \ty: ");
Serial.print(acce.readAccY());
Serial.print(" mg \tz: ");
Serial.print(acce.readAccZ());
Serial.println(" mg");
if(intFlag == 1){
//Check whether the interrupt event is generated in int1
if(acce.getInt1Event(DFRobot_LIS::eYHigherThanTh)){
Serial.println("The acceleration in the y direction is greater than the threshold");
}
if(acce.getInt1Event(DFRobot_LIS::eZHigherThanTh)){
Serial.println("The acceleration in the z direction is greater than the threshold");
}
if(acce.getInt1Event(DFRobot_LIS::eXHigherThanTh)){
Serial.println("The acceleration in the x direction is greater than the threshold");
}
intFlag = 0;
}
delay(300);
}
Result
- When the acceleration in the Z direction exceeds the threshold, the serial monitor will print the corresponding interrupt event message.
Additional Information
- Screenshot of selecting the example code:
Was this article helpful?