Example Code for Arduino-Read Acceleration of XYZ
Last revision 2026/01/19
Get the acceleration in the three directions of xyz, the range can be ±6g, ±12g or ±24g. When using SPI, chip select pin can be modified by changing the value of LIS331HH_CS.
Hardware Preparation
- DFRduino UNO R3 (or similar) x 1
- LIS331HH Triple Axis Accelerometer x1
- Jumper wires
Software Preparation
- Arduino IDE
- Download and install the LIS Series Library and Sample Code. (About how to install the library?)
Wiring Diagram
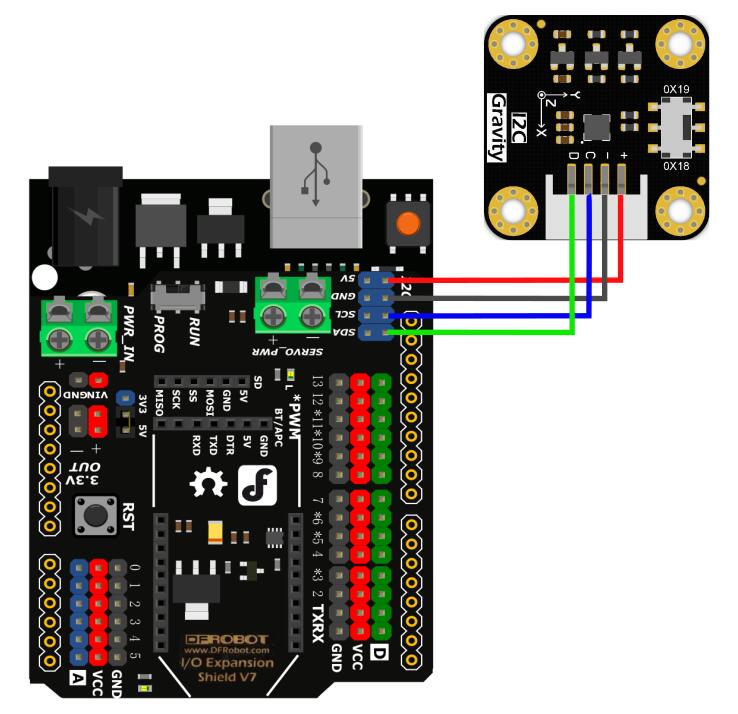
Other Preparation Work
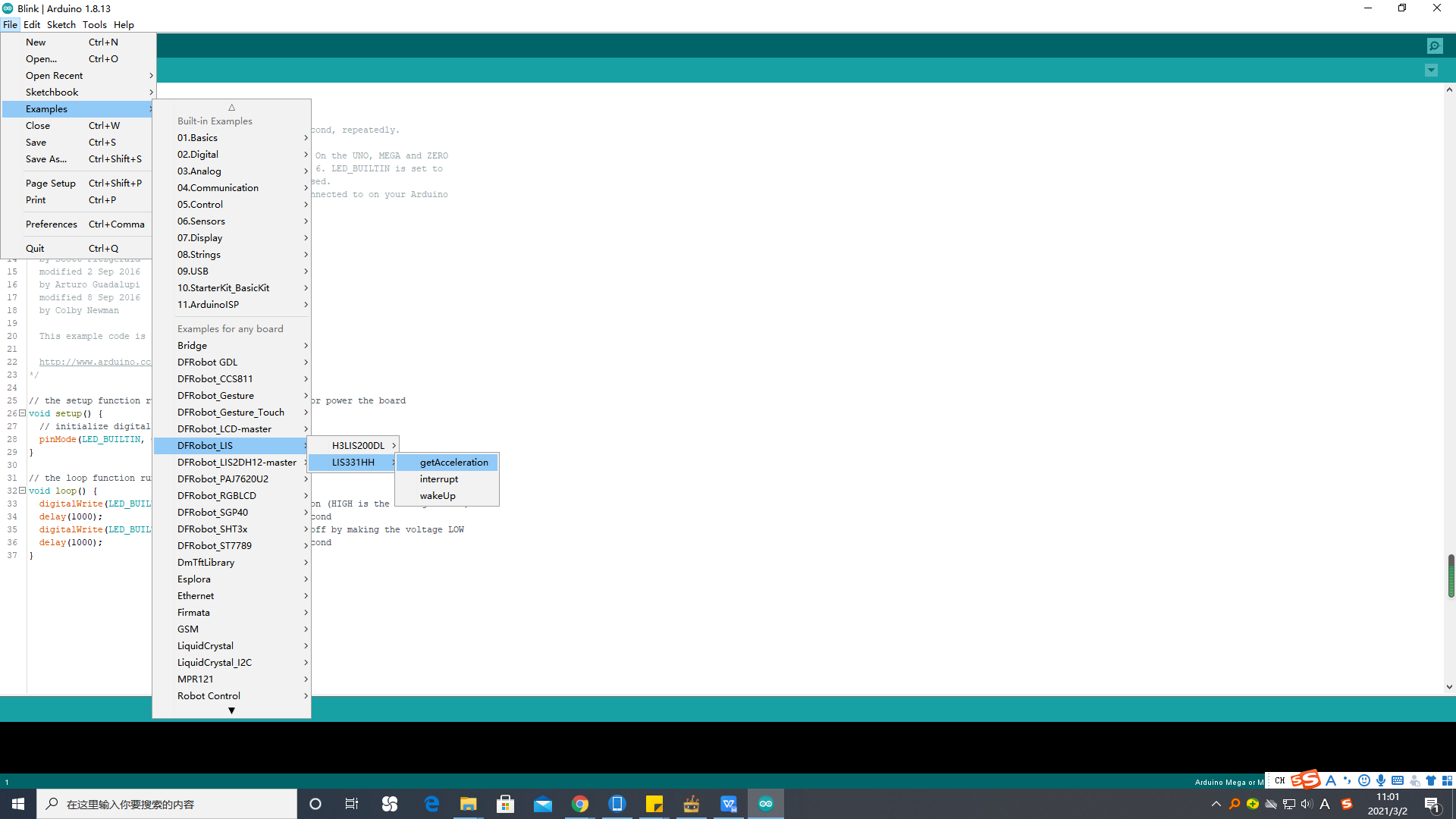
- Select getAcceleration.ino from the library examples.
Sample Code
/**!
* @file getAcceleration.ino
* @brief Get the acceleration in the three directions of xyz, the range can be ±6g, ±12g or ±24g
* @n When using SPI, chip select pin can be modified by changing the value of LIS331HH_CS
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli]([email protected])
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS331HH_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS331HH_I2C acce(&Wire,0x18);
DFRobot_LIS331HH_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS331HH_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS331HH_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS331HH_CS 3
#elif (defined NRF5)
#define LIS331HH_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs : Chip selection pinChip selection pin
* @param spi :SPI controller
*/
//DFRobot_LIS331HH_SPI acce(/*cs = */LIS331HH_CS,&SPI);
//DFRobot_LIS331HH_SPI acce(/*cs = */LIS331HH_CS);
void setup(void){
Serial.begin(9600);
//Chip initialization
while(!acce.begin()){
delay(1000);
Serial.println("Initialization failed, please check the connection and I2C address setting");
}
//Get chip id
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
/**
set range:Range(g)
eLis331hh_6g = 6,/<±6g>/
eLis331hh_12g = 12,/<±12g>/
eLis331hh_24g = 24/<±24g>/
*/
acce.setRange(/*range = */DFRobot_LIS::eLis331hh_6g);
/**
Set data measurement rate:
ePowerDown_0HZ = 0,
eLowPower_halfHZ,
eLowPower_1HZ,
eLowPower_2HZ,
eLowPower_5HZ,
eLowPower_10HZ,
eNormal_50HZ,
eNormal_100HZ,
eNormal_400HZ,
eNormal_1000HZ,
*/
acce.setAcquireRate(/*rate = */DFRobot_LIS::eNormal_50HZ);
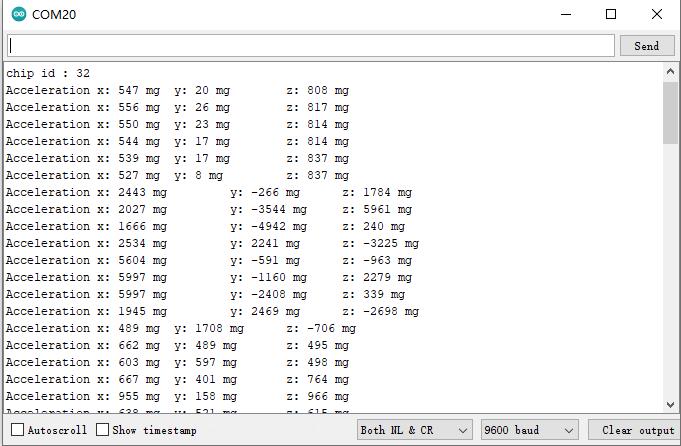
Serial.print("Acceleration:\n");
delay(1000);
}
void loop(void){
//Get the acceleration in the three directions of xyz
//The mearsurement range can be ±6g, ±12g or ±24g, set by the setRange() function
long ax,ay,az;
ax = acce.readAccX();//Get the acceleration in the x direction
ay = acce.readAccY();//Get the acceleration in the y direction
az = acce.readAccZ();//Get the acceleration in the z direction
//acce.getAcceFromXYZ(/*accx = */ax,/*accy = */ay,/*accz = */az);//The second way to obtain acceleration in three directions
Serial.print("x: "); //print acceleration
Serial.print(ax);
Serial.print(" mg \ty: ");
Serial.print(ay);
Serial.print(" mg \tz: ");
Serial.print(az);
Serial.println(" mg");
delay(300);
}
Result
Additional Information
- Screenshot of selecting the example code:
Was this article helpful?