Example Code for Arduino - Calibration
Last revision 2026/03/06
This tutorial provides a comprehensive guide on calibrating the Gravity STCC4 CO2 Sensor using Arduino UNO. It includes hardware setup, software installation, and a detailed example code for sensor calibration. Users learn to perform calibration with known CO2 concentration, set temperature, humidity, and pressure compensation, and obtain accurate environmental measurements. This guide enhances understanding of sensor functionality and data acquisition.
Hardware
- DFRduino UNO + IO Expansion Board (SKU: DFR0216-2) ×1
- Gravity: STCC4 CO2 Sensor (SKU: SEN0678) ×1
Software
- Download Arduino IDE: Download Arduino IDE
- DFRobot_STCC4 library: DFRobot_STCC4 library
- For Arduino IDE V1.8.19 (or earlier) install libraries: How to load libraries
- For Arduino IDE V2.0.0 (or above), please directly search and install "DFRobot_STCC4" library in the library manager.
Wiring Diagram
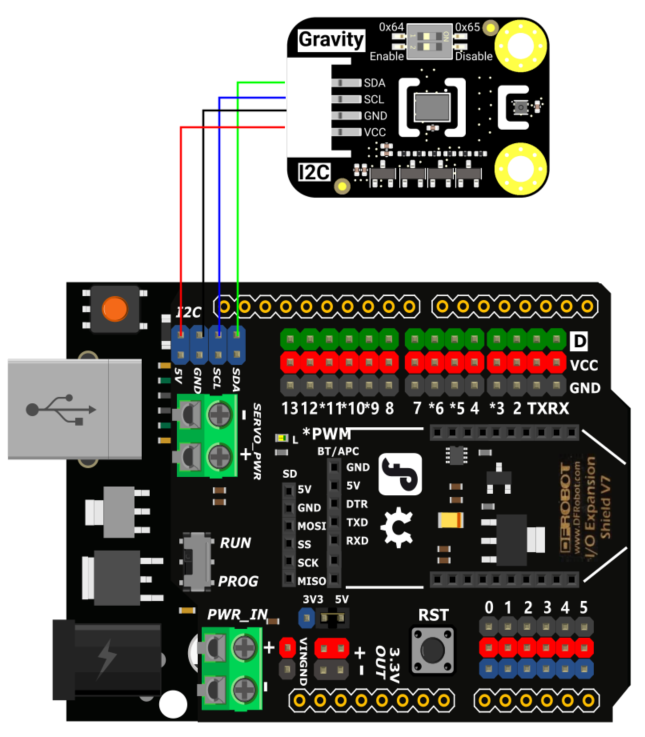
| Sensor Side | Pin Name | Controller Side | Pin Name |
|---|---|---|---|
| Gravity STCC4 CO2 Sensor | VCC | DFRduino UNO | 5V |
| Gravity STCC4 CO2 Sensor | GND | DFRduino UNO | GND |
| Gravity STCC4 CO2 Sensor | SCL | DFRduino UNO | SCL |
| Gravity STCC4 CO2 Sensor | SDA | DFRduino UNO | SDA |
Sample Code
This sketch performs 30 consecutive samples, then runs a forced calibration, and continues sampling afterwards. If the temperature and humidity sensor is connected, the sketch reports CO2, temperature and humidity; otherwise the temperature/humidity values are defaults.
/*!
* @file reaclibration.ino
* @brief This routine will calibrate the sensor, but it requires the actual CO2 concentration in the environment to be known.
* @n The routine will perform 30 pre-calibration samplings, then conduct the calibration, and continue sampling after the calibration.
* @n If you connect the humidity and temperature sensor, you can obtain the concentration of carbon dioxide and temperature and humidity.
* @n If the temperature and humidity sensors are not connected, the obtained temperature and humidity values is the default values.
* @n The demo supports FireBeetle-ESP32, and FireBeetle-ESP8266, Arduino Uno, Leonardo, Mega2560, FireBeetle-M0.
* @details Experimental phenomenon: The read data will be output in the serial port monitor.
*
* @copyright Copyright (c) 2025 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author [lbx]([email protected])
* @version V1.0
* @date 2025-08-14
* @url https://github.com/DFRobot/DFRobot_STCC4
*/
#include "DFRobot_STCC4.h"
#include <string.h>
/**
* The target CO2 concentration to calibrate.
* The input range of CO2 concentration is 0 - 32000 ppm.
*/
const uint16_t target = 600;
/* The frc correction values returned by the sensor are generally not used. */
uint16_t frcCorrection;
/**
* The environmental temperature obtained from STCC4.
* If no temperature and humidity sensor is connected, this value will be the default value or the set value.
*/
float temperature;
/**
* The environmental humidity obtained from STCC4.
* If no temperature and humidity sensor is connected, this value will be the default value or the set value.
*/
float humidity;
/* The CO2 concentration obtained from STCC4. */
uint16_t co2Concentration;
/* The status of the sensor. */
uint16_t sensorStatus;
/**
* Set temperature compensation.
* The range is 10 - 40℃.
* The unit is degrees Celsius.
* It only takes effect when the temperature and humidity sensor is disconnected from the STCC4.
*/
const uint16_t tCompensation = 26;
/**
* Set humidity compensation.
* The range is 20 - 80%RH.
* It only takes effect when the temperature and humidity sensor is disconnected from the STCC4.
*/
const uint16_t hCompensation = 55;
/**
* Set pressure compensation.
* The range is 400 - 1100 hPa.
* Unit is hPa.
*/
const uint16_t pCompensation = 950;
/**
* The sensor can communicate via two specific addresses (0x64 and 0x65).
* "Dip switch" (for Gravity version): A small switch on the board that you can toggle by hand.
*/
const uint8_t ADDR = 0x64;
DFRobot_STCC4_I2C sensor(&Wire, ADDR); // Create an instance of the DFRobot_STCC4_I2C class with the I2C address ADDR.
void setup() {
Serial.begin(115200);
while(!Serial) delay(100); // Wait for the serial port to be ready.
Serial.println("This demo will force-calibrate the sensor based on the CO2 concentration you input.\n");
/* Initialize the sensor */
while(!sensor.begin()){
Serial.println("Init error!");
delay(500);
}
/* Wake up the sensor */
sensor.wakeup();
delay(10);
/**
* Get the ID of the sensor.
*/
Serial.print("ID: 0x");
Serial.println(sensor.getID(), HEX);
/**
* @brief Set temperature and humidity compensation
* @param temperature Temperature compensation value
* @param humidity Humidity compensation value
* @return true if successful, false otherwise
*/
if(sensor.setRHTcompensation(tCompensation, hCompensation)){
Serial.println("Set RHT compensation successful.");
}else{
Serial.println("Set RHT compensation error!");
}
/**
* @brief Set pressure compensation
* @param pressure Pressure compensation value
* @return true if successful, false otherwise
*/
if(sensor.setPressureCompensation(pCompensation)){
Serial.println("Set pressure compensation successful.");
}else{
Serial.println("Set pressure compensation error!");
}
/* Start 30 consecutive samplings */
sensor.startMeasurement();
for(uint8_t i = 0; i < 30; i++){
delay(2000);
/**
* @brief Read measurement data
* @param co2Concentration Pointer to store CO2 concentration
* @param temperature Pointer to store temperature
* @param humidity Pointer to store humidity
* @param sensorStatus Pointer to store sensor status
* @return true if successful, false otherwise
*/
if(sensor.measurement(&co2Concentration,&temperature,&humidity,&sensorStatus)){
Serial.print("CO2:");
Serial.print(co2Concentration);
Serial.print(" ppm ");
Serial.print(" temperature:");
Serial.print(temperature);
Serial.print(" ℃ ");
Serial.print(" humidity:");
Serial.print(humidity);
Serial.print(" % ");
Serial.print("status:");
Serial.println(sensorStatus);
}
}
/* Stop sampling */
sensor.stopMeasurement();
delay(1000);
/* Start calibration */
/**
* @brief Perform forced recalibration
* @param targetPpm Target PPM value for recalibration
* @param frcCorrection Pointer to store the correction value
* @return true if successful, false otherwise
*/
sensor.forcedRecalibration(target, &frcCorrection);
/**The calibration is determined to be valid by checking the value of frc.
*If frc is equal to 0xffff or 0, it is invalid; otherwise, it is valid.
*/
while(frcCorrection == 0xffff || frcCorrection == 0){
Serial.println("Calibration failed!\n");
delay(1000);
sensor.forcedRecalibration(target, &frcCorrection);
}
Serial.print("CO2 concentration correction:");
Serial.println(frcCorrection);
/* Start sampling */
sensor.startMeasurement();
}
void loop() {
delay(2000);
/**
* @brief Read measurement data
* @param co2Concentration Pointer to store CO2 concentration
* @param temperature Pointer to store temperature
* @param humidity Pointer to store humidity
* @param sensorStatus Pointer to store sensor status, 0 means normal, otherwise error.
* @return true if successful, false otherwise
*/
if(sensor.measurement(&co2Concentration,&temperature,&humidity,&sensorStatus)){
Serial.print("After correction, CO2:");
Serial.print(co2Concentration);
Serial.print(" ppm ");
Serial.print(" temperature:");
Serial.print(temperature);
Serial.print(" ℃ ");
Serial.print(" humidity:");
Serial.print(humidity);
Serial.print(" % ");
Serial.print(" status:");
Serial.println(sensorStatus);
}
}
Result

Was this article helpful?