Example Code for Arduino-Motion Detection via UART
This article offers example code for Arduino-based motion detection via UART, detailing hardware and software setup, wiring, and sample code execution. It guides users through configuring a millimeter wave presence sensor with Arduino, enabling effective detection of moving objects and sensor mode adjustments.
Hardware Preparation
Software Preparation
- Arduino IDE,Click to download Arduino IDE
- DFRobot_C4001 library,Click to download the DFRobot_C4001 library.
Wiring Diagram

| mmWave | Arduino Uno |
|---|---|
| VIN | 5V |
| GND | GND |
| C/R | D5 |
| D/T | D4 |
Other Preparation Work
Please switch the DIP switch on the back of the sensor to the UART direction.
Sample Code
/*!
* @file motionDetection.ino
* @brief Example of radar detecting whether an object is moving
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @license The MIT License (MIT)
* @author ZhixinLiu([email protected])
* @version V1.0
* @date 2024-02-02
* @url https://github.com/dfrobot/DFRobot_C4001
*/
#include "DFRobot_C4001.h"
//#define I2C_COMMUNICATION //use I2C for communication, but use the serial port for communication if the line of codes were masked
#ifdef I2C_COMMUNICATION
/*
* DEVICE_ADDR_0 = 0x2A default iic_address
* DEVICE_ADDR_1 = 0x2B
*/
DFRobot_C4001_I2C radar(&Wire ,DEVICE_ADDR_0);
#else
/* ---------------------------------------------------------------------------------------------------------------------
* board | MCU | Leonardo/Mega2560/M0 | UNO | ESP8266 | ESP32 | microbit | m0 |
* VCC | 3.3V/5V | VCC | VCC | VCC | VCC | X | vcc |
* GND | GND | GND | GND | GND | GND | X | gnd |
* RX | TX | Serial1 TX1 | 5 | 5/D6 | D2 | X | tx1 |
* TX | RX | Serial1 RX1 | 4 | 4/D7 | D3 | X | rx1 |
* ----------------------------------------------------------------------------------------------------------------------*/
/* Baud rate cannot be changed */
#if defined(ARDUINO_AVR_UNO) || defined(ESP8266)
SoftwareSerial mySerial(4, 5);
DFRobot_C4001_UART radar(&mySerial ,9600);
#elif defined(ESP32)
DFRobot_C4001_UART radar(&Serial1 ,9600 ,/*rx*/D2 ,/*tx*/D3);
#else
DFRobot_C4001_UART radar(&Serial1 ,9600);
#endif
#endif
void setup()
{
Serial.begin(115200);
while(!Serial);
while(!radar.begin()){
Serial.println("NO Deivces !");
delay(1000);
}
Serial.println("Device connected!");
// exist Mode
radar.setSensorMode(eExitMode);
sSensorStatus_t data;
data = radar.getStatus();
// 0 stop 1 start
Serial.print("work status = ");
Serial.println(data.workStatus);
// 0 is exist 1 speed
Serial.print("work mode = ");
Serial.println(data.workMode);
// 0 no init 1 init success
Serial.print("init status = ");
Serial.println(data.initStatus);
Serial.println();
/*
* min Detection range Minimum distance, unit cm, range 0.3~25m (30~2500), not exceeding max, otherwise the function is abnormal.
* max Detection range Maximum distance, unit cm, range 2.4~25m (240~2500)
* trig Detection range Maximum distance, unit cm, default trig = max
*/
if(radar.setDetectionRange(/*min*/30, /*max*/1000, /*trig*/1000)){
Serial.println("set detection range successfully!");
}
// set trigger sensitivity 0 - 9
if(radar.setTrigSensitivity(1)){
Serial.println("set trig sensitivity successfully!");
}
// set keep sensitivity 0 - 9
if(radar.setKeepSensitivity(2)){
Serial.println("set keep sensitivity successfully!");
}
/*
* trig Trigger delay, unit 0.01s, range 0~2s (0~200)
* keep Maintain the detection timeout, unit 0.5s, range 2~1500 seconds (4~3000)
*/
if(radar.setDelay(/*trig*/100, /*keep*/4)){
Serial.println("set delay successfully!");
}
// get confige params
Serial.print("trig sensitivity = ");
Serial.println(radar.getTrigSensitivity());
Serial.print("keep sensitivity = ");
Serial.println(radar.getKeepSensitivity());
Serial.print("min range = ");
Serial.println(radar.getMinRange());
Serial.print("max range = ");
Serial.println(radar.getMaxRange());
Serial.print("trig range = ");
Serial.println(radar.getTrigRange());
Serial.print("keep time = ");
Serial.println(radar.getKeepTimerout());
Serial.print("trig delay = ");
Serial.println(radar.getTrigDelay());
}
void loop()
{
// Determine whether the object is moving
if(radar.motionDetection()){
Serial.println("exist motion");
Serial.println();
}
delay(100);
}
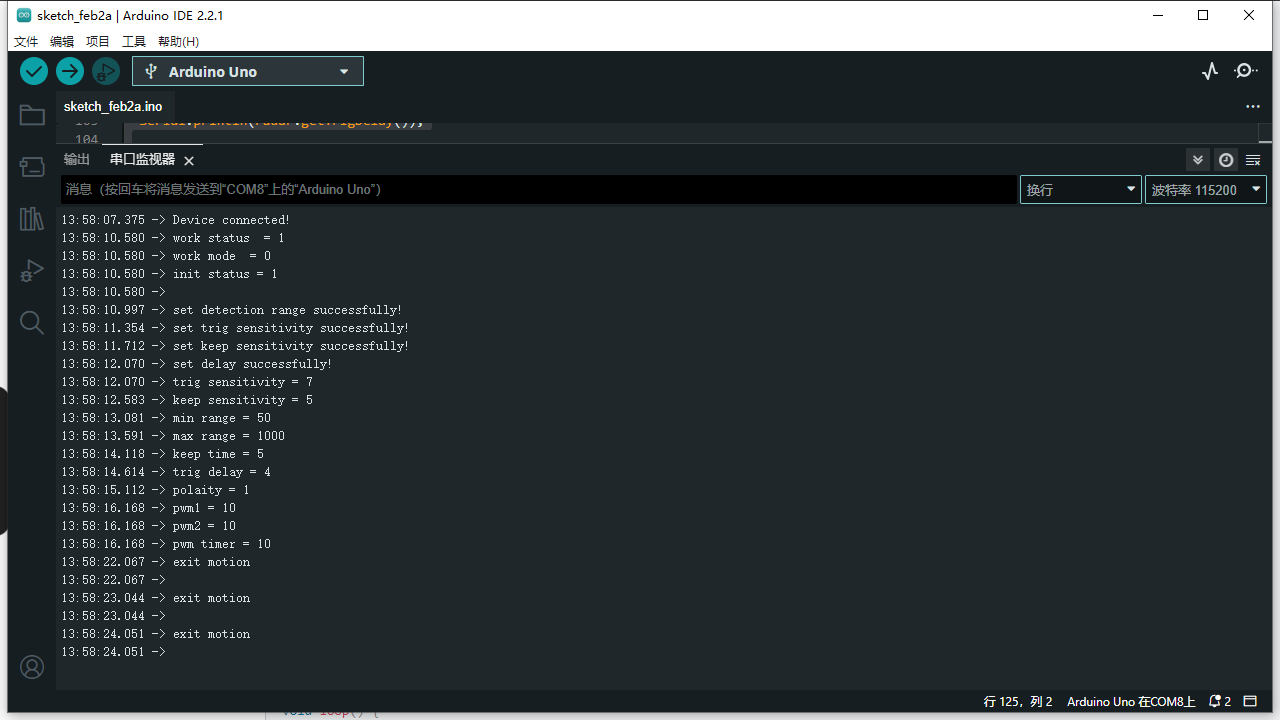
Result
When someone is detected, "exist motion" will be output.
Was this article helpful?