For M0--Sample code 7-Motion detection(activityDetect.ino)
Last revision 2026/01/29
Requirements
-
Hardware
- Firebeetle Board-M0 x 1
- LIS2DW12 Triple Axis Accelerometer x1
- Jumper wires x1
-
Software
- Arduino IDE
- Download and install the LIS Series Library and Sample Code. (About how to install the library?)
- About how to use Firebeetle Board-M0?
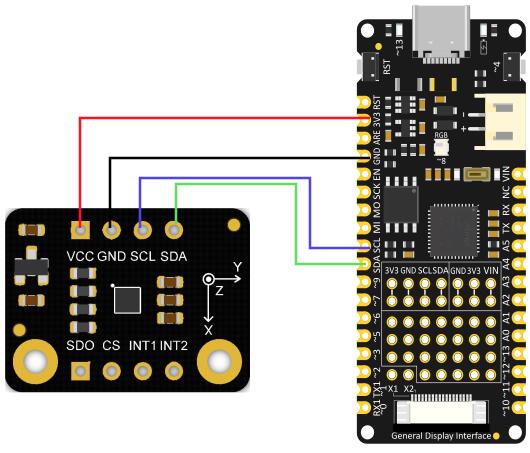
Connection
Connect your sensor to M0 controller.
Sample code 7-Motion detection(activityDetect.ino)
- Select activityDetect.ino

- Program Burning
/**!
* @file activityDetect.ino
* @brief Motion detection, can detect whether the module is moving
* @n It’s necessary to go into low power mode before using this function. Then call setActMode() to make the chip in sleep mode.
* @n In this state, the measurement rate is 12.5hz.
* @n When the acceleration change in a certain direction is detected to exceed the threshold, the measurement rate will be increased
* @n to the normal rate we set before. The threshold can be set by the setWakeUpThreshold() function.
* @n But if the move stops moving, also, the acceleration change in the three directions is less than the threshold, the chip will turn into sleep
* @n mode after a period of time. This duration time can be set by the setWakeUpDur() function.
* @n When using SPI, chip select pin can be modified by changing the value of LIS2DW12_CS.
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [fengli]([email protected])
* @version V1.0
* @date 2021-01-16
* @get from https://www.dfrobot.com
* @https://github.com/DFRobot/DFRobot_LIS
*/
#include <DFRobot_LIS2DW12.h>
//When using I2C communication, use the following program to construct an object by DFRobot_LIS2DW12_I2C
/*!
* @brief Constructor
* @param pWire I2c controller
* @param addr I2C address(0x18/0x19)
*/
//DFRobot_LIS2DW12_I2C acce(&Wire,0x18);
DFRobot_LIS2DW12_I2C acce;
//When using SPI communication, use the following program to construct an object by DFRobot_LIS2DW12_SPI
#if defined(ESP32) || defined(ESP8266)
#define LIS2DW12_CS D3
#elif defined(__AVR__) || defined(ARDUINO_SAM_ZERO)
#define LIS2DW12_CS 3
#elif (defined NRF5)
#define LIS2DW12_CS 2 //The pin on the development board with the corresponding silkscreen printed as P2
#endif
/*!
* @brief Constructor
* @param cs Chip selection pinChip selection pin
* @param spi SPI controller
*/
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS);
//DFRobot_LIS2DW12_SPI acce(/*cs = */LIS2DW12_CS,&SPI);
void setup(void){
Serial.begin(9600);
while(!acce.begin()){
Serial.println("Communication failed, check the connection and I2C address setting when using I2C communication.");
delay(1000);
}
Serial.print("chip id : ");
Serial.println(acce.getID(),HEX);
//Software reset
acce.softReset();
/**!
Set the sensor measurement range:
e2_g /<±2g>/
e4_g /<±4g>/
e8_g /<±8g>/
e16_g /<±16g>/
*/
acce.setRange(DFRobot_LIS2DW12::e2_g);
/**!
Filter settings:
eLPF(Low pass filter)
eHPF(High pass filter)
*/
acce.setFilterPath(DFRobot_LIS2DW12::eLPF);
/**!
Set bandwidth:
eRateDiv_2 ,/<Rate/2 (up to Rate = 800 Hz, 400 Hz when Rate = 1600 Hz)>/
eRateDiv_4 ,/<Rate/4 (High Power/Low power)>*
eRateDiv_10 ,/<Rate/10 (HP/LP)>/
eRateDiv_20 ,/< Rate/20 (HP/LP)>/
*/
acce.setFilterBandwidth(DFRobot_LIS2DW12::eRateDiv_4);
/**
Wake-up duration: when using the detection mode of eDetectAct in the setActMode() function, it will collect data
at a normal rate after the chip is awakened. Then after a period of time, the chip will continue to hibernate, collecting data at a frequency of 12.5hz.
dur (0 ~ 3)
time = dur * (1/Rate)(unit:s)
| An example of a linear relationship between an argument and time |
|------------------------------------------------------------------------------------------------------------------------|
| | | | | |
| Data rate | 25 Hz | 100 Hz | 400 Hz | = 800 Hz |
|------------------------------------------------------------------------------------------------------------------------|
| time |dur*(1s/25)= dur*40ms| dur*(1s/100)= dur*10ms | dur*(1s/400)= dur*2.5ms | dur*(1s/800)= dur*1.25ms |
|------------------------------------------------------------------------------------------------------------------------|
*/
acce.setWakeUpDur(/*dur = */2);
//Set wakeup threshold, when the acceleration change exceeds this value, the eWakeUp event will be triggered, unit:mg
//The value is within the range.
acce.setWakeUpThreshold(/*threshold = */0.2);
/**!
Set power mode:
eHighPerformance_14bit /<High-Performance Mode,14-bit resolution>/
eContLowPwr4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution)>/
eContLowPwr3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution)>/
eContLowPwr2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution)/
eContLowPwr1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution)>/
eSingleLowPwr4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution)>/
eSingleLowPwr3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution)>/
eSingleLowPwr2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution)>/
eSingleLowPwr1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution)>/
eHighPerformanceLowNoise_14bit /<High-Performance Mode,Low-noise enabled,14-bit resolution>/
eContLowPwrLowNoise4_14bit /<Continuous measurement,Low-Power Mode 4(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise3_14bit /<Continuous measurement,Low-Power Mode 3(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise2_14bit /<Continuous measurement,Low-Power Mode 2(14-bit resolution,Low-noise enabled)>/
eContLowPwrLowNoise1_12bit /<Continuous measurement,Low-Power Mode 1(12-bit resolution,Low-noise enabled)>/
eSingleLowPwrLowNoise4_14bit /<Single data conversion on demand mode,Low-Power Mode 4(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise3_14bit /<Single data conversion on demand mode,Low-Power Mode 3(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise2_14bit /<Single data conversion on demand mode,Low-Power Mode 2(14-bit resolution),Low-noise enabled>/
eSingleLowPwrLowNoise1_12bit /<Single data conversion on demand mode,Low-Power Mode 1(12-bit resolution),Low-noise enabled>/
*/
acce.setPowerMode(DFRobot_LIS2DW12::eContLowPwrLowNoise1_12bit);
/**!
Set the mode of motion detection:
eNoDetection /<No detection>/
eDetectAct /<If set this mode, the rate of the chip will drop to 12.5hz and turn into normal measurement frequency
after the eWakeUp event is generated.>/
eDetectStatMotion /<In this mode, it can only detect if the chip is in sleep mode without changing the measurement frequency
and power mode, continuously measuring the data at normal frequency.>/
*/
acce.setActMode(DFRobot_LIS2DW12::eDetectAct);
/**!
Set the interrupt source of the int1 pin:
eDoubleTap(Double click)
eFreeFall(Free fall)
eWakeUp(wake up)
eSingleTap(single-Click)
e6D(Orientation change check)
*/
acce.setInt1Event(DFRobot_LIS2DW12::eWakeUp);
/**!
Set the sensor data collection rate:
eRate_0hz /<Measurement off>/
eRate_1hz6 /<1.6hz, use only under low-power mode>/
eRate_12hz5 /<12.5hz>/
eRate_25hz
eRate_50hz
eRate_100hz
eRate_200hz
eRate_400hz /<Use only under High-Performance mode>/
eRate_800hz /<Use only under High-Performance mode>/
eRate_1k6hz /<Use only under High-Performance mode>/
eSetSwTrig /<The software triggers a single measurement>/
*/
acce.setDataRate(DFRobot_LIS2DW12::eRate_200hz);
delay(100);
}
void loop(void){
//Motion detected
if(acce.actDetected()){
Serial.println("Activity Detected!");
Serial.print("x: ");
Serial.print(acce.readAccX());
Serial.print(" mg \t y: ");
Serial.print(acce.readAccY());
Serial.print(" mg \t z: ");
Serial.print(acce.readAccZ());
Serial.println(" mg");
delay(100);
}
}
Result

Was this article helpful?