Reference
Library
- Download link: DFRobot_BMP3XX
- Installation guide: (About how to install the library?)
Communication Protocol Description
-
Communication Interface: I2C/SPI
-
Default I2C Address:0×77 (default address)/0×76 (optional: SDO pin connects to GND)
-
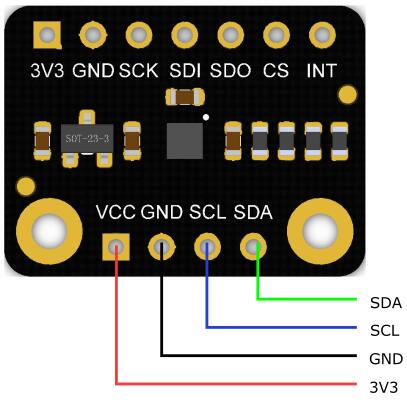
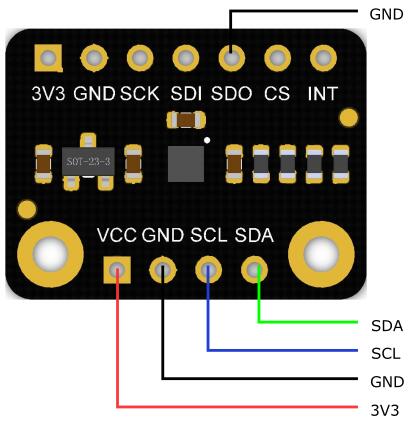
Connection tips for different communication methods:
- I2C: 0x77 (default)
- I2C:0x76
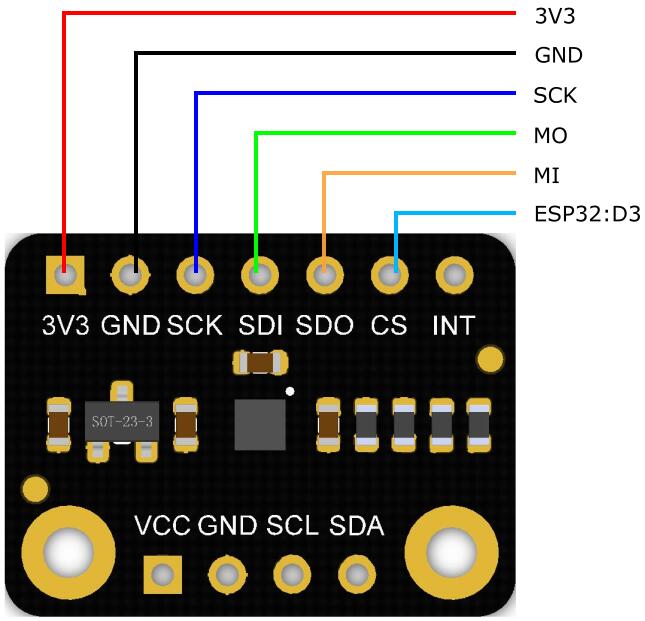
- SPI
-
cs pin can choose the pin that does not conflict
-
Interrupt pin connection
| Motherboard | Default connection pin |
|---|---|
| UNO/MEGA2560 | D2 |
| Leonardo | D3 |
| Micro:bit | P0 |
| ESP32/ESP8266/ARDUINO_SAM_ZERO(M0) | ESP32/ESP8266/ARDUINO_SAM_ZERO(M0) |
| ESP32/ESP8266/ARDUINO_SAM_ZERO(M0) | GPIO25 |
API Description
/**
* @brief Initialize function
* @return Return 0 to indicate initialization succeed, return other values indicate failed and return an error code
*/
virtual int begin(void);
/**
* @brief commonly used sampling modes that allows users to configure easily
* @param mode:
* eUltraLowPrecision,Ultra-low precision, suitable for monitoring weather (lowest power consumption), the power is mandatory mode.
* eLowPrecision,Low precision, suitable for random detection, power is normal mode
* eNormalPrecision1,Normal precision 1, suitable for dynamic detection on handheld devices (e.g on mobile phones), power is normal mode
* eNormalPrecision2,Normal precision 2, suitable for drones, power is normal mode
* eHighPrecision,High precision, suitable for low-power handled devices (e.g mobile phones), power is normal mode
* eUltraPrecision,Ultra-high precision, suitable for indoor navigation, its acquisition rate will be extremely low, and the acquisition cycle is 1000 ms.
* @return Return True indicate configuration succeed, False indicate failed and remain its original state
*/
bool setSamplingMode(ePrecisionMode_t mode);
/**
* @brief Get the sampling period in the current mode
* @return Return sampling period, unit: us
*/
uint32_t getSamplingPeriodUS(void);
/**
* @brief Get temperature measurement value from register, working range (-40 ‒ +85 °C)
* @return Return temperature measurements, unit: °C
*/
float readTempC(void);
/**
* @brief Get pressure measurement value from register, working range(300‒1250 hPa)
* @brief If the reference value is provided before, the absolute value of the current position pressure is calculated according to the calibrated sea level
* @n atmospheric pressure
* @return Return pressure measurements, unit: Pa
*/
float readPressPa(void);
/**
* @brief Take the given current location altitude as the reference value to eliminate the absolute difference for subsequent pressure and altitude data
* @param altitude Altitude in current position
* @return If pass in the reference value successfully, return turn. If failed, return false.
*/
bool calibratedAbsoluteDifference(float altitude);
/**
* @brief Calculate the altitude based on the atmospheric pressure measured by the sensor
* @brief If the reference value is provided before, the absolute value of the current sealevel is calculated according to the calibrated sea level atmospheric pressure
* @return Return altitude, unit: m
*/
float readAltitudeM(void);
/**
* @brief Get the cached data in the FIFO
* @brief Temperature unit: °C; Pressure unit: Pa
*/
void getFIFOData(float &FIFOTemperatureC, float &FIFOPressurePa);
/**
* @brief FIFO empty command and soft reset command of sensor
* @param mode Basic sensor commands, three types of commands:
* BMP3XX_CMD_NOP, Null command
* BMP3XX_CMD_FIFO_FLUSH, Clear all data in the FIFO without changing its settings
* BMP3XX_CMD_SOFTRESET, Trigger a reset, all user configuration settings will be overwritten by their default state
*/
void setCommand(uint8_t mode);
/**
* @brief FIFO water level settings configuration
* @param WTMSetting FIFO water level (0-511) needs to be set. That FIFO fills up to the water level will trigger an interrupt
*/
void setFIFOWTM(uint16_t WTMSetting);
/**
* @brief FIFO configuration 1 (FIFO1)
* @param mode The FIFO mode needs to set, the following modes add up to mode:
* eFIFODIS: Disable FIFO ,eFIFOEN: Enable FIFO
* eFIFOStopOnFullDIS: Continue writing when full ,eFIFOStopOnFullEN:Stop writing when full
* eFIFOTimeDIS: Disable ,eFIFOTimeEN: Enable return to the sensor time frame after the last valid data frame
* eFIFOPressDIS: Disable pressure data storage ,eFIFOPressEN:Enable pressure data storage
* eFIFOTempDIS: Disable temperature data storage,eFIFOTempEN:Enable temperature data storage
*/
void setFIFOMode1(uint8_t mode);
/**
* @brief FIFO Configuration 2(FIFO2)
* @param mode The FIFO mode needs to set, the following modes add up to mode:
* 8 FIFO sampling options for pressure and temperature data (1-128), the coefficient is 2^fifo_subsampling(0-7):
* eFIFOSubsampling0, eFIFOSubsampling1, eFIFOSubsampling2, eFIFOSubsampling3,
* eFIFOSubsampling4, eFIFOSubsampling5, eFIFOSubsampling6, eFIFOSubsampling7,
* eFIFODataSelectDIS: Unfiltered data (compensated or uncompensated) ,eFIFODataSelectEN: Filtered data (compensated or uncompensated), plus two retention states:
* the same as "unfilt"
*/
void setFIFOMode2(uint8_t mode);
/**
* @brief Interrupt configuration(INT)
* @param mode The interrupt mode needs to set. The following modes add up to mode:
* Interrupt pin output mode: eINTPinPP: Push pull,eINTPinOD:Open drain
* Interrupt pin active level: eINTPinActiveLevelLow: Active low ,eINTPinActiveLevelHigh:Active high
* Register interrupt latch: eINTLatchDIS: Disable,eINTLatchEN:Enable
* FIFO water level reached interrupt: eINTFWTMDIS: Disable,eINTFWTMEN:Enable
* FIFO full interrupt: eINTFFullDIS: Disable,eINTFFullEN: Enable
* Interrupt pin initial (invalid, non-interrupt) level: eINTInitialLevelLOW:low ,eINTInitialLevelHIGH:high
* Interrupt pin initial (invalid, non-interrupt) level: eINTDataDrdyDIS: Disable ,eINTDataDrdyEN: Enable
*/
void setINTMode(uint8_t mode);
/**
* @brief Configure measurement mode and power mode
* @param mode The measurement mode and power mode that need to set. The following modes add up to mode:
* ePressDIS:Disable pressure measurement ,ePressEN: Enable pressure measurement
* eTempDIS: Disable temperature measurement ,eTempEN: Enable temperature measurement
* eSleepMode, eForcedMode, eNormalMode Three modes:
* Sleep mode: It will be in sleep mode by default after power-on reset. In this mode, no measurement is performed and power consumption is minimal.
* All registers are accessible for reading the chip ID and compensation coefficient.
* Forced mode: In this mode, the sensor will take a single measurement according to the selected measurement and filtering options. After the measurement is
* completed, the sensor will return to sleep mode, and the measurement result can be obtained in the register.
* Normal mode: Continuously loop between the measurement period and the standby period. The output data rates are related to the ODR mode setting.
*/
void setPWRMode(uint8_t mode);
/**
* @brief Configure the oversampling when measuring pressure and temperature (OSR:over-sampling register)
* @param mode Oversampling mode of pressure and temperature measurement need to be set. The following modes add up to mode:
6 pressure oversampling modes:
ePressOSRMode1, Pressure sampling×1,16 bit / 2.64 Pa(Recommend temperature oversampling×1)
ePressOSRMode2, Pressure sampling×2,16 bit / 2.64 Pa(Recommend temperature oversampling×1)
ePressOSRMode4, Pressure sampling×4,18 bit / 0.66 Pa(Recommend temperature oversampling×1)
ePressOSRMode8, Pressure sampling×8,19 bit / 0.33 Pa(Recommend temperature oversampling×2)
ePressOSRMode16, Pressure sampling×16,20 bit / 0.17 Pa(Recommend temperature oversampling×2)
ePressOSRMode32, Pressure sampling×32,21 bit / 0.085 Pa(Recommend temperature oversampling×2)
6 temperature oversampling modes
eTempOSRMode1, Temperature sampling×1,16 bit / 0.0050 °C
eTempOSRMode2, Temperature sampling×2,16 bit / 0.0025 °C
eTempOSRMode4, Temperature sampling×4,18 bit / 0.0012 °C
eTempOSRMode8, Temperature sampling×8,19 bit / 0.0006 °C
eTempOSRMode16, Temperature sampling×16,20 bit / 0.0003 °C
eTempOSRMode32, Temperature sampling×32,21 bit / 0.00015 °C
*/
void setOSRMode(uint8_t mode);
/**
* @brief Set the output data rate setting in subdivision/sub-sampling mode(ODR:output data rates)
* @param mode The output data rate needs to be set, configurable mode:
* BMP3XX_ODR_200_HZ,BMP3XX_ODR_100_HZ,BMP3XX_ODR_50_HZ,BMP3XX_ODR_25_HZ,BMP3XX_ODR_12P5_HZ,
* BMP3XX_ODR_6P25_HZ,BMP3XX_ODR_3P1_HZ,BMP3XX_ODR_1P5_HZ,BMP3XX_ODR_0P78_HZ,BMP3XX_ODR_0P39_HZ,
* BMP3XX_ODR_0P2_HZ,BMP3XX_ODR_0P1_HZ,BMP3XX_ODR_0P05_HZ,BMP3XX_ODR_0P02_HZ,BMP3XX_ODR_0P01_HZ,
* BMP3XX_ODR_0P006_HZ,BMP3XX_ODR_0P003_HZ,BMP3XX_ODR_0P0015_HZ
* @return Return True indicate configuration succeed, False indicate failed and remains its original state
bool setODRMode(uint8_t mode);
/**
* @brief IIR filter coefficient configuration (IIR filtering)
* @param mode Set IIR filter coefficient, configurable mode:
* BMP3XX_IIR_CONFIG_COEF_0,BMP3XX_IIR_CONFIG_COEF_1,BMP3XX_IIR_CONFIG_COEF_3,
* BMP3XX_IIR_CONFIG_COEF_7,BMP3XX_IIR_CONFIG_COEF_15,BMP3XX_IIR_CONFIG_COEF_31,
* BMP3XX_IIR_CONFIG_COEF_63,BMP3XX_IIR_CONFIG_COEF_127
*/
void setIIRMode(uint8_t mode);
/**
* @brief Get FIFO cached data size
* @return Range of returned value: 0-511
*/
uint16_t getFIFOLength(void);
/**
* @brief Get the water level set by FIFO
* @return Range of returned value: 0-511
*/
uint16_t getFIFOWTMValue(void);
Other Supplementary Information
{kind=link}
Was this article helpful?