Example Code for Arduino-Data processing advanced setting function
Data processing advanced setting function
Hardware Preparation
- Firebeetle Board-M0 x 1
- BMP390L digital barometric pressure sensor × 1
- Jumper wires
Software Preparation
- Arduino IDE
- Download and install the Library files and sample programs. (About how to install the library?)
- Or get Library files from Arduino :


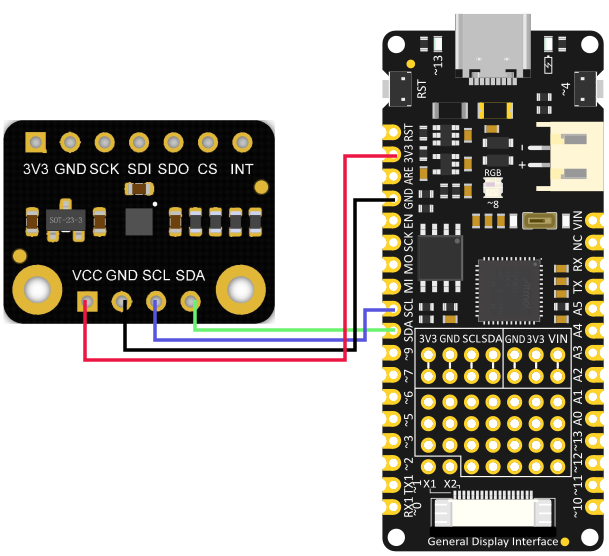
Wiring Diagram
Sample Code
-
Select set_ODR_OSR_IIR.ino

-
Burning program
/*!
* @file set_ODR_OSR_IIR.ino
* @brief Advanced data processing settings, configure more advanced data sampling and processing modes that meet your needs more.
* @n Configure measurement mode: sleep mode, enforcement mode, normal mode
* @n Configure pressure and temperature over-sampling mode (increase sampling times)
* @n Set the output data rate setting in subdivision/sub-sampling mode (set the data output rate, which must be less than the sampling frequency)
* @n IIR filter coefficient setting (filter noise)
* @copyright Copyright (c) 2010 DFRobot Co.Ltd (http://www.dfrobot.com)
* @licence The MIT License (MIT)
* @author [qsj]([email protected])
* @version V0.1
* @date 2021-4-30
* @get from https://www.dfrobot.com
* @url https://github.com/DFRobot/DFRobot_BMP3XX
*/
#include <DFRobot_BMP3XX.h>
/**
* Select the chip version BMP388/BMP390L
* Select communication interface IIC, please comment out SPI interface.
* IIC communication address settings: eSDOGND: connect SDO pin to GND, I2C address is 0×76 now.
* eSDOVDD: Connect SDO pin to VDDIO (3v3), I2C address is 0×77 now
* Notice: If using Gravity products, IIC communication address is 0×77 by default
*/
//DFRobot_BMP388_IIC sensor(&Wire, sensor.eSDOVDD);
DFRobot_BMP390L_IIC sensor(&Wire, sensor.eSDOVDD);
/**
* Select the chip version BMP388/BMP390L
* Select communication interface SPI, please comment out IIC interface.
* Set up digital pin according to the on-board pin connected with SPI chip-select pin.
* Notice: csPin used here is D3 digital pin on ESP32, other non-conflicting pins can also be selected as external interrupt pins
*/
// uint8_t csPin = D3;
// DFRobot_BMP388_SPI sensor(&SPI, csPin);
// DFRobot_BMP390L_SPI sensor(&SPI, csPin);
/* If you do not need to eliminate the absolute difference of measurement, please comment the following line */
#define CALIBRATE_ABSOLUTE_DIFFERENCE
void setup(void)
{
Serial.begin(115200);
int rslt;
while( ERR_OK != (rslt = sensor.begin()) ){
if(ERR_DATA_BUS == rslt){
Serial.println("Data bus error!!!");
}else if(ERR_IC_VERSION == rslt){
Serial.println("Chip versions do not match!!!");
}
delay(3000);
}
Serial.println("Begin ok!");
/**
* Configure measurement mode and power mode
* mode The measurement mode and power mode that need to set. The following modes add up to mode:
* ePressDIS: Disable pressure measurement, ePressEN: Enable pressure measurement
* eTempDIS: Disable temperature measurement, eTempEN: Enable temperature measurement
* eSleepMode, eForcedMode/, eNormalMode Three modes:
* Sleep mode: It will be in sleep mode by default after power-on reset. In this mode, no measurement is performed and power consumption is minimal. All registers
* are accessible for reading the chip ID and compensation coefficient.
* Enforcement mode: In enforcement mode, the sensor will take a single measurement according to the selected measurement and filtering options. After the measurement
* is completed, the sensor will return to sleep mode, and the measurement result can be obtained in the register.
* Normal mode: Continuously loop between the measurement period and the standby period. The measurement rate can be set in the odrSel register, and you can choose
* the prescaler with different sampling frequency Fsampling=200Hz.
*/
sensor.setPWRMode(sensor.ePressEN +
sensor.eTempEN +
sensor.eNormalMode);
/**
* Configure the oversampling when measuring pressure and temperature
* mode Oversampling mode of pressure and temperature measurement need to set. The following modes add up to mode:
* 6 pressure oversampling mode:
* ePressOSRMode1, Pressure sampling × 1, 16 bit / 2.64 Pa (Recommend temperature oversampling × 1)
* ePressOSRMode2, Pressure sampling × 2, 16 bit / 2.64 Pa (Recommend temperature oversampling × 1)
* ePressOSRMode4, Pressure sampling × 4, 18 bit / 0.66 Pa (Recommend temperature oversampling × 1)
* ePressOSRMode8, Pressure sampling × 8, 19 bit / 0.33 Pa (Recommend temperature oversampling × 2)
* ePressOSRMode16, Pressure sampling × 16, 20 bit / 0.17 Pa (Recommend temperature oversampling × 2)
* ePressOSRMode32, Pressure sampling × 32, 21 bit / 0.085 Pa (Recommend temperature oversampling × 2)
* 6 temperature oversampling mode
* eTempOSRMode1, Temperature sampling × 1, 16 bit / 0.0050 °C
* eTempOSRMode2, Temperature sampling × 2, 16 bit / 0.0025 °C
* eTempOSRMode4, Temperature sampling × 4, 18 bit / 0.0012 °C
* eTempOSRMode8, Temperature sampling × 8, 19 bit / 0.0006 °C
* eTempOSRMode16, Temperature sampling × 16, 20 bit / 0.0003 °C
* eTempOSRMode32, Temperature sampling × 32, 21 bit / 0.00015 °C
*/
sensor.setOSRMode(sensor.ePressOSRMode4 +
sensor.eTempOSRMode1);
/**
* Configure output data rate in subdivision/sub-sampling mode
* mode The output data rate needs to set, configurable mode
* BMP3XX_ODR_200_HZ,BMP3XX_ODR_100_HZ,BMP3XX_ODR_50_HZ,BMP3XX_ODR_25_HZ,BMP3XX_ODR_12P5_HZ,
* BMP3XX_ODR_6P25_HZ,BMP3XX_ODR_3P1_HZ,BMP3XX_ODR_1P5_HZ,BMP3XX_ODR_0P78_HZ,BMP3XX_ODR_0P39_HZ,
* BMP3XX_ODR_0P2_HZ,BMP3XX_ODR_0P1_HZ,BMP3XX_ODR_0P05_HZ,BMP3XX_ODR_0P02_HZ,BMP3XX_ODR_0P01_HZ,
* BMP3XX_ODR_0P006_HZ,BMP3XX_ODR_0P003_HZ,BMP3XX_ODR_0P0015_HZ
*/
while( !sensor.setODRMode(BMP3XX_ODR_50_HZ) ){
Serial.println("Set ODR mode fail! Please select lower frequency!");
delay(3000);
}
/**
* IIR filter coefficient configuration
* mode Set IIR filter coefficient, configurable mode:
* BMP3XX_IIR_CONFIG_COEF_0,BMP3XX_IIR_CONFIG_COEF_1,BMP3XX_IIR_CONFIG_COEF_3,
* BMP3XX_IIR_CONFIG_COEF_7,BMP3XX_IIR_CONFIG_COEF_15,BMP3XX_IIR_CONFIG_COEF_31,
* BMP3XX_IIR_CONFIG_COEF_63,BMP3XX_IIR_CONFIG_COEF_127
*/
sensor.setIIRMode(BMP3XX_IIR_CONFIG_COEF_3);
delay(100);
#ifdef CALIBRATE_ABSOLUTE_DIFFERENCE
/**
* Calibrate the sensor according to the current altitude
* In this example, we use an altitude of 540 meters in Wenjiang District of Chengdu (China). Please change to the local altitude when using it.
* If this interface is not called, the measurement data will not eliminate the absolute difference
* Note: This interface is only valid for the first call
*/
if( sensor.calibratedAbsoluteDifference(540.0) ){
Serial.println("Absolute difference base value set successfully!");
}
#endif
}
void loop()
{
/* Read currently measured temperature date directly, unit: °C */
float temperature = sensor.readTempC();
Serial.print("temperature : ");
Serial.print(temperature);
Serial.println(" C");
/* Directly read the currently measured pressure data, unit: pa */
float Pressure = sensor.readPressPa();
Serial.print("Pressure : ");
Serial.print(Pressure);
Serial.println(" Pa");
Serial.println();
delay(1000);
}
Result

Additional Information
**Notice: **The tutorial example uses an altitude of 540 meters in Wenjiang District, Chengdu (China). Please change to the local altitude calibration when actually using it.
Was this article helpful?