Fermion: ICG 20660L Accel+Gyro 6-Axis IMU Module
SKU: SEN0443
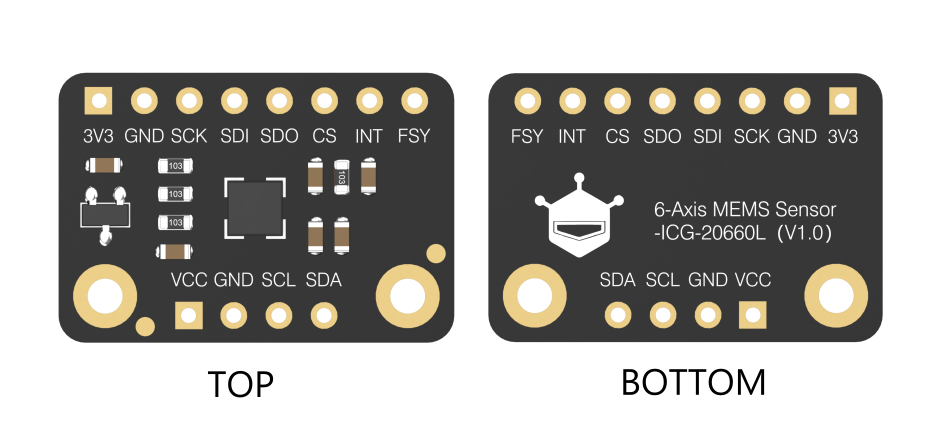
The ICG-20660L is a high-precision 6-axis IMU integrating a 3-axis accelerometer, a 3-axis gyroscope, and a 16-bit ADC for stable digital output. With ±1% initial sensitivity error and low-noise performance (6.5 mdps/√Hz), it delivers excellent motion detection for stabilization applications. The built-in 512-byte FIFO, programmable interrupts, and FSYNC synchronization support enable seamless integration with camera and video systems for OIS/EIS designs. Its compact size offers flexible installation in space-constrained applications. This sensor is ideal for digital and smartphone cameras, OIS/EIS stabilization systems, DSLR mechanisms, sports wearables, and other handheld devices requiring reliable anti-shake performance.