Wireless Vibration Joystick Module V2.0
SKU: DFR0182
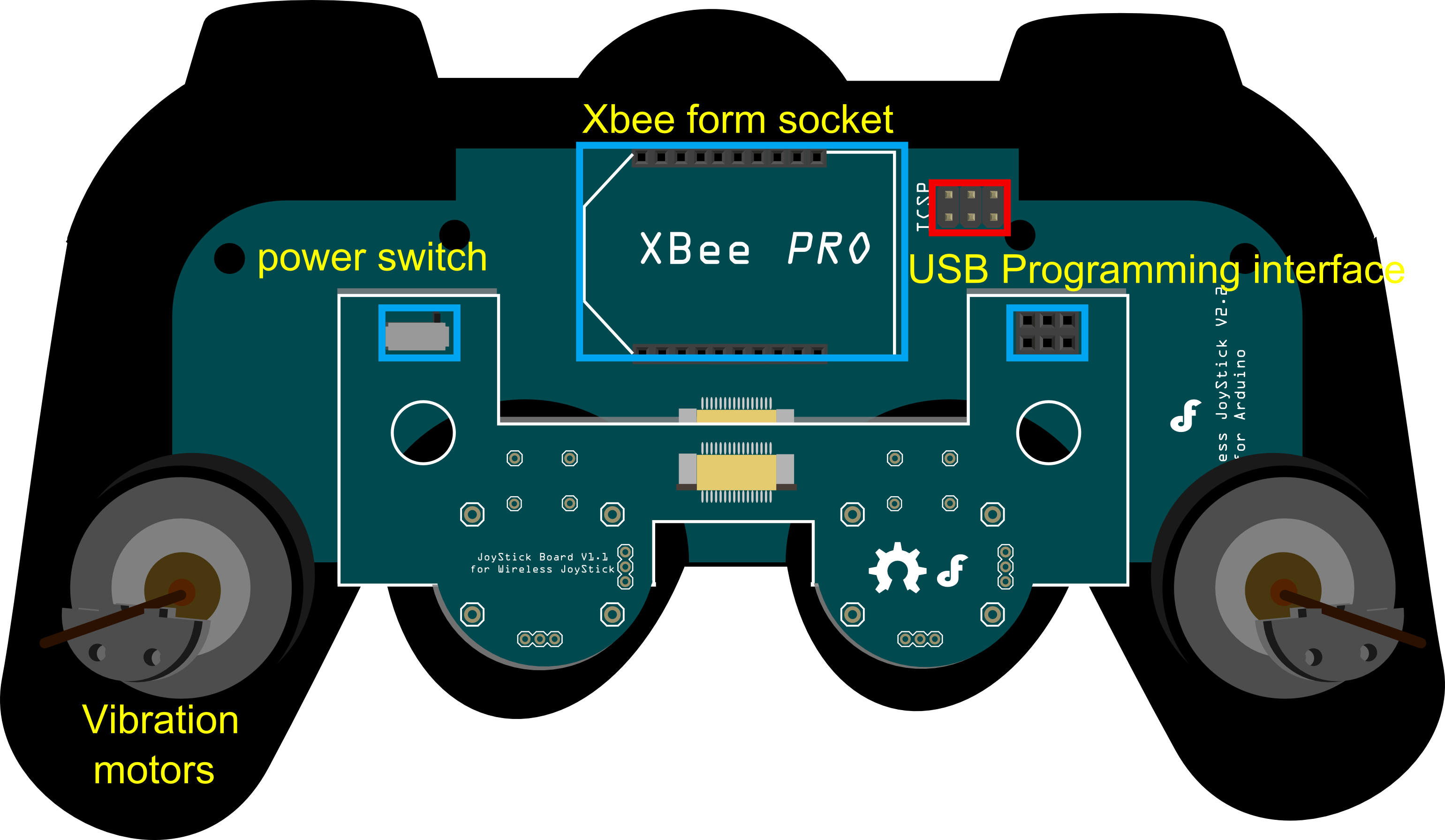
The Wireless Joystick v2 for Arduino is the first gamepad based on Arduino from DFRobot. It support Xbee, Bluetooth, RF and Wifi via the Xbee socket. Makes it possible to custom your own wireless communication for controlling your robots, mobile platforms, UAVs, etc.