Gravity: BMP388 Barometric Pressure Sensors
SKU: SEN0251
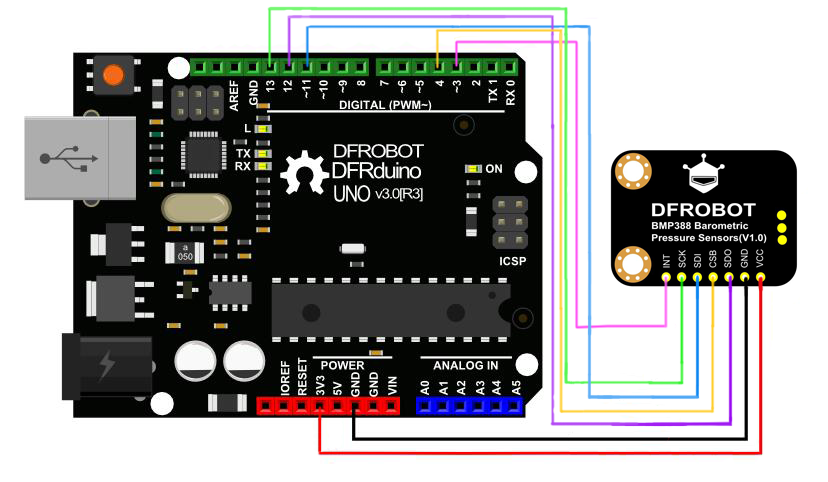
The article outlines the specifications of the Gravity BMP388 Barometric Pressure Sensor, detailing its operating voltage, current, range, and accuracy. It highlights the sensor’s temperature coefficient, absolute accuracy across various temperatures, operating temperature range, and interface options, including Gravity-IIC and SPI. The sensor's external dimensions and mounting hole specifications are also provided, making it ideal for precise environmental measurements.