TT Motor with Encoder (6V 160RPM 120:1)
SKU: FIT0450
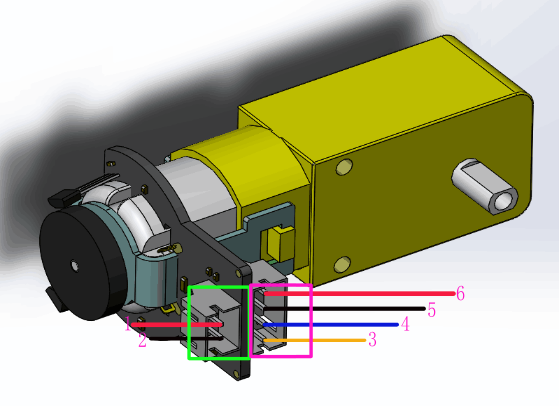
This is the DFRobot Micro [DC geared motor](https://www.dfrobot.com/category-110.html) with encoder. It is a motor with a 120:1 gearbox and an integrated quadrature encoder that provides a resolution of 8 pulse single per round giving a maximum output of 960 within one round. With an [Arduino controller](https://www.dfrobot.com/category-104.html) and [motor driver](https://www.dfrobot.com/category-105.html), applications for this might include a closed-loop PID control or PWM motor speed control. This motor is an ideal option for mobile robot projects. The copper output shaft, embedded thread and reinforced connector greatly extends the motor's service life.