Gravity: AS3935 Lightning Detection Sensor
SKU: SEN0290
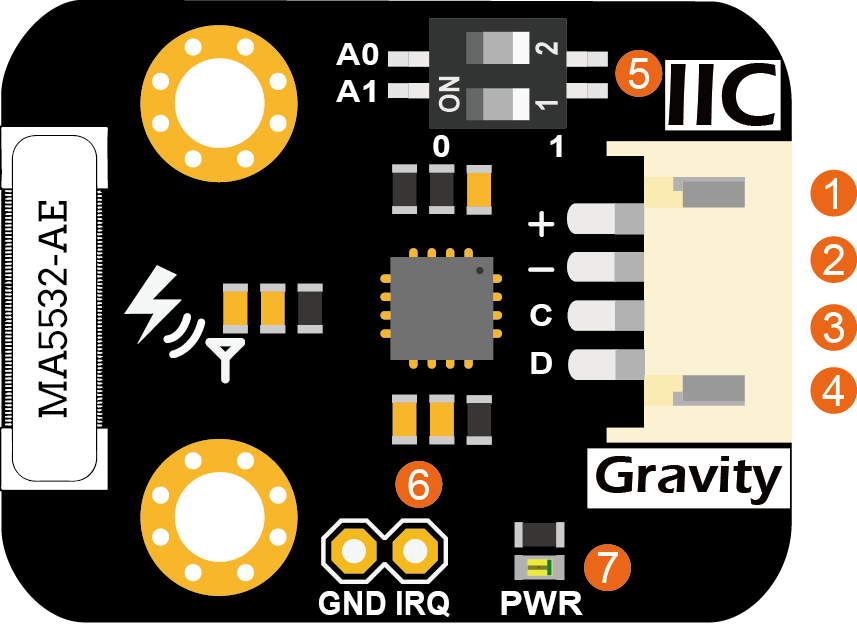
Gravity: AS3935 Lightning Detection Sensor uses AMS’ AS3935 IC and Coilcraft MA5532-AE antenna to detect lightning distance, intensity, and frequency within 40km (indoors/outdoors). It has an embedded disturber rejection algorithm to avoid household appliance interference. Applications include: weather enthusiasts measuring thunderstorm data; embedding in wearables for outdoor/high-altitude workers (thunderstorm early warning); triggering backup power in lightning-sensitive equipment; and triggering camera shutters for lightning photography. Tutorials for Arduino/Raspberry Pi, FAQs, and more docs are available.