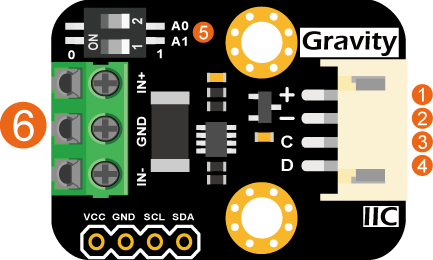
Gravity: INA219 Digital Wattmeter Module
SKU: SEN0291
The Gravity I²C Digital Wattmeter is built on TI’s INA219 zero-drift current and power monitoring technology, enabling precise measurement of voltage, current, and power within a 0–26 V and ±8 A range. Its 10 mΩ low-temperature-drift alloy shunt resistor delivers high resolution (4 mV / 1 mA) and excellent stability; the maximum relative error is less than ±0.2% (A simple manual calibration is required before usage). The module supports bidirectional high-side current sensing, allowing accurate monitoring of both charging and discharging states—ideal for battery systems and solar power applications. Through the Gravity interface, it provides I²C communication with four selectable addresses for flexible multi-module integration. Its compact design and low power consumption make it well-suited for solar power management, battery fuel gauging, electronic module power evaluation, and embedded system energy monitoring.