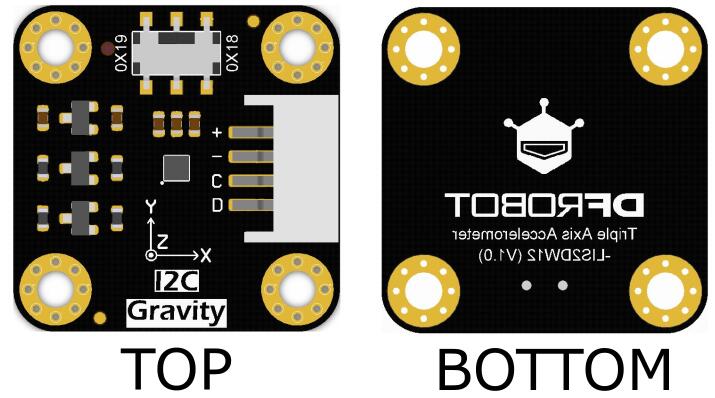
Gravity: I2C LIS2DW12 Triple Axis Accelerometer Sensor
SKU: SEN0409
The LIS2DW12 Triple Axis Accelerometer Sensor is an ultra-low-power device designed for precise motion and acceleration detection. It features two independent programmable interrupts and a specialized internal engine capable of performing various functions, including free-fall detection, portrait/landscape detection, 6D/4D orientation detection, configurable single/double-tap recognition, stationary/motion detection, and smart power-saving motion wakeup. The sensor offers user-selectable full scales of ±2 g/±4 g/±8 g/±16 g and measures acceleration with output data rates ranging from 1.6 Hz to 1600 Hz. Additionally, it provides multiple operating modes and bandwidth choices to accommodate specific application needs. Sample programs for these functions are included for user convenience, making the LIS2DW12 a versatile tool for motion detection applications.