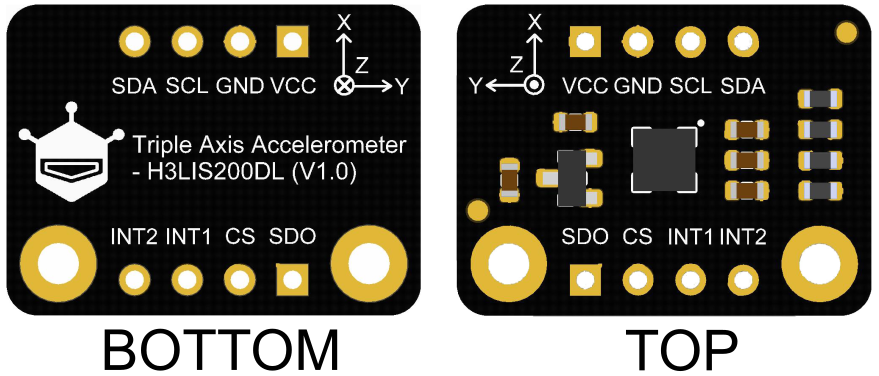
Fermion: I2C H3LIS200DL Triple Axis Accelerometer
SKU: SEN0408
H3LIS200DL Triple Axis Accelerometer, a low-power liner accelerometer with low noise and large scale ranges, features ultra-low-power operational modes that can realize smart sleep to wake-up function that allows advanced power saving. Moreover, as this sensor comes with two built-in independent programmable interrupt generators, users can generate a custom interrupt to wake up interrupt. Besides, it has a selectable range scale of ±100 g or ±200 g, capable of measuring acceleration at output data rates from 0.5 Hz to 1 kHz.