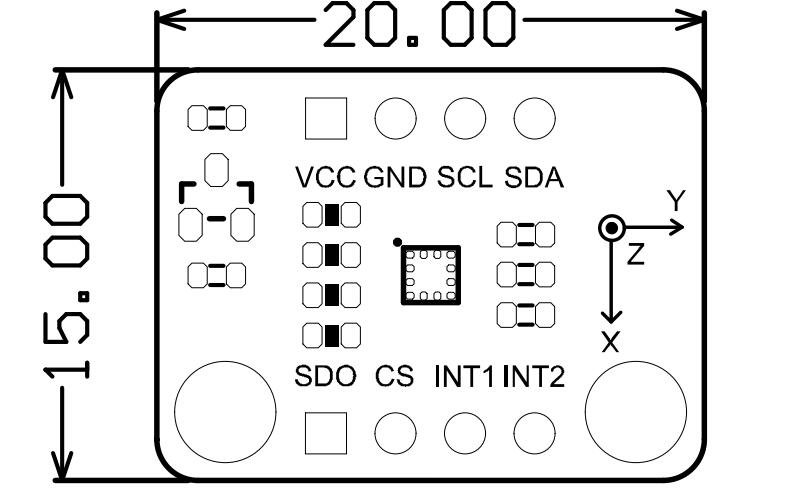
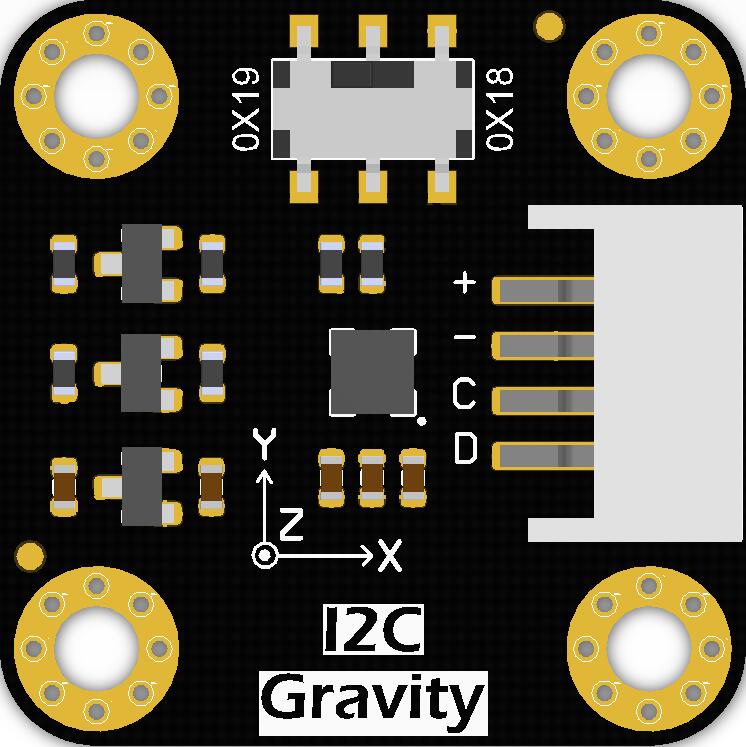
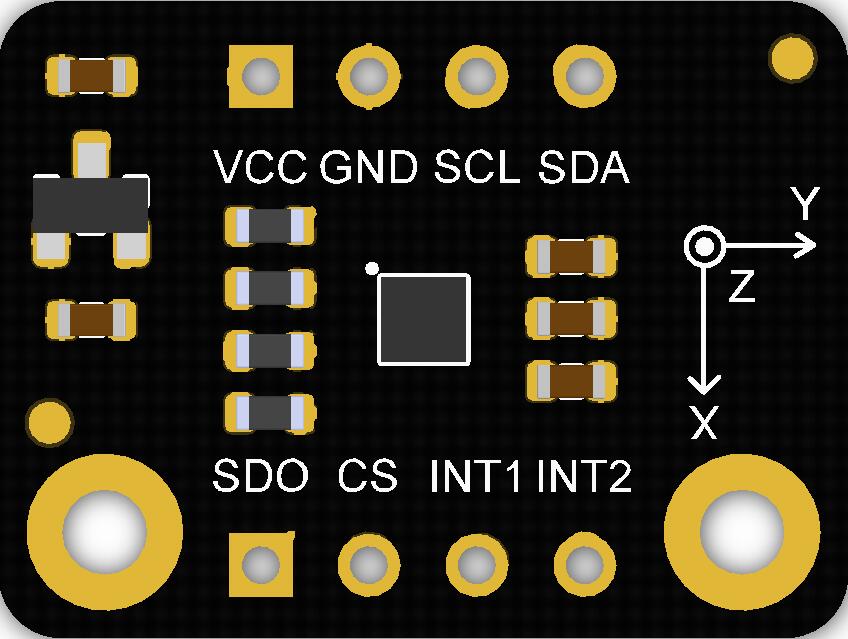
Fermion: LIS2DW12 Triple Axis Accelerometer
SKU: SEN0405
The LIS2DW12 is an ultra-low power three-axis linear accelerometer designed for versatile motion and acceleration detection, featuring programmable interrupts, selectable full scales, varied output data rates, and multiple operating modes for smart power saving and enhanced functionality.