RS485 Soil pH, Moisture, Temperature Monitoring Sensor
SKU: SEN0602
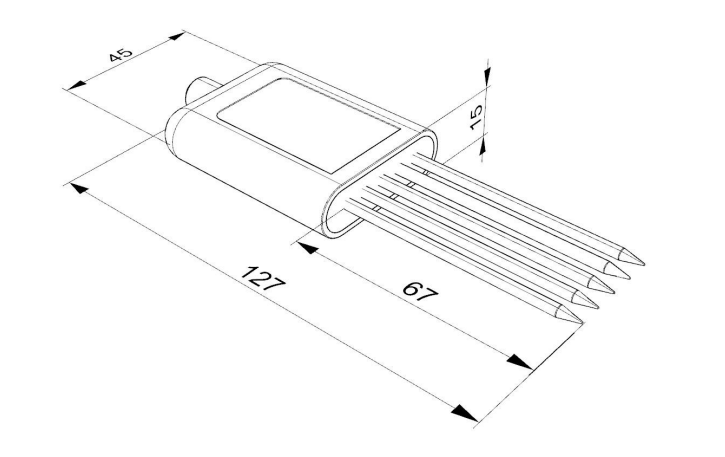
This Soil Temperature, Humidity & pH Sensor measures soil temperature, humidity, and pH. It has a 5-30V wide voltage supply, RS485 output, fast response, and stable output. Compatible with Arduino UNO R3 + TTL-485 board for quick setup. IP68 protection, vacuum-sealed with black flame-retardant epoxy. 316 stainless steel probe (rust-proof, waterproof, anti-corrosion, salt-alkali & long-term electrolysis resistant). Small, suitable for long-term soil burial and various soil types.