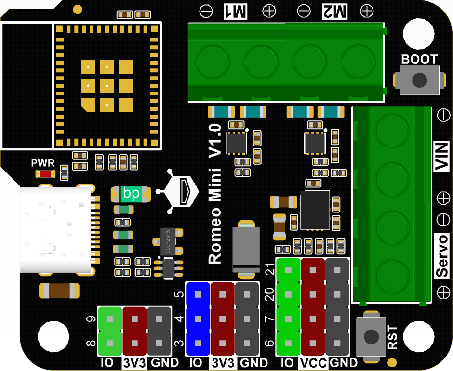
Romeo ESP32-C3-MINI-1 Motor & Servo Control Board
SKU: DFR1063
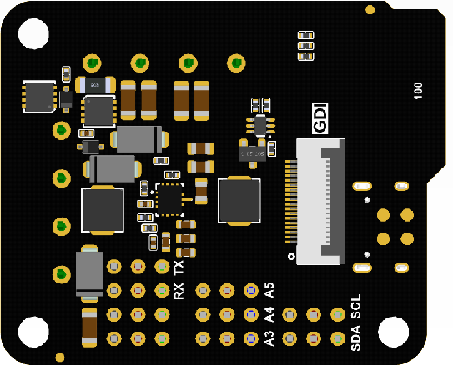
The Romeo mini robot controller is the ESP32 version of Romeo BLE mini, using an onboard ESP32-C3 module (Wi-Fi + Bluetooth 5). It has 2-channel 1.7A motor drivers, 9 IO interfaces (analog/digital/UART/I2C, Gravity-compatible), a servo power port, and a back GDI interface for IPS displays. It meets robot motor and servo control needs.