SimpleFOCmini FOC Brushless DC Motor Driver Board
SKU: DRI0058
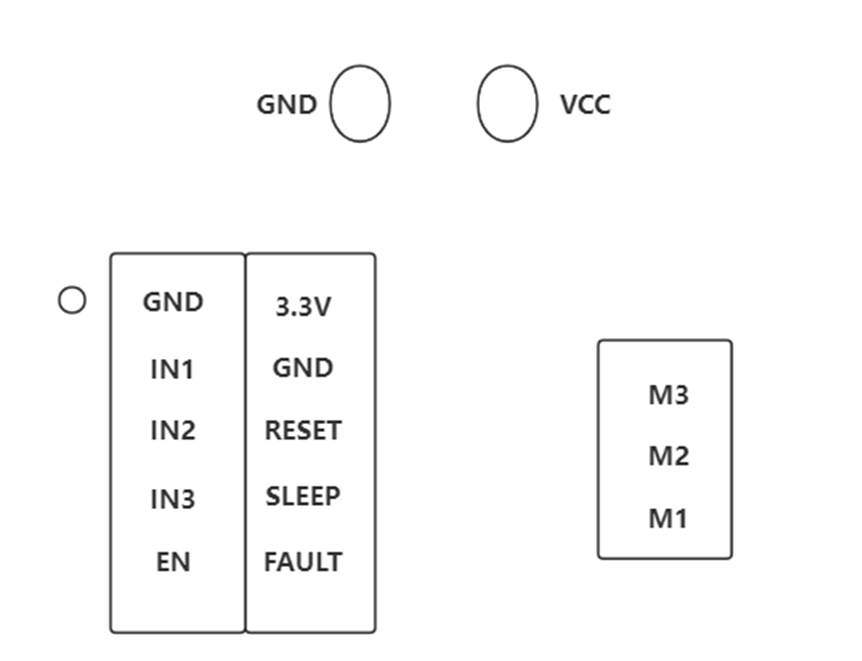
The SimpleFOCmini brushless DC motor driver board simply connects to the control signal and the motor's UVW three-phase wires to achieve open/closed-loop control of the position, speed, and torque of a BLDC motor. It supports SPWM and SVPWM control algorithms, but not the traditional 6-step commutation control algorithm. Using it with a three-phase brushless DC motor allows for quick startup using the SimpleFOC open-source library, and is compatible with development boards such as Arduino, ESP32, and Raspberry Pi.