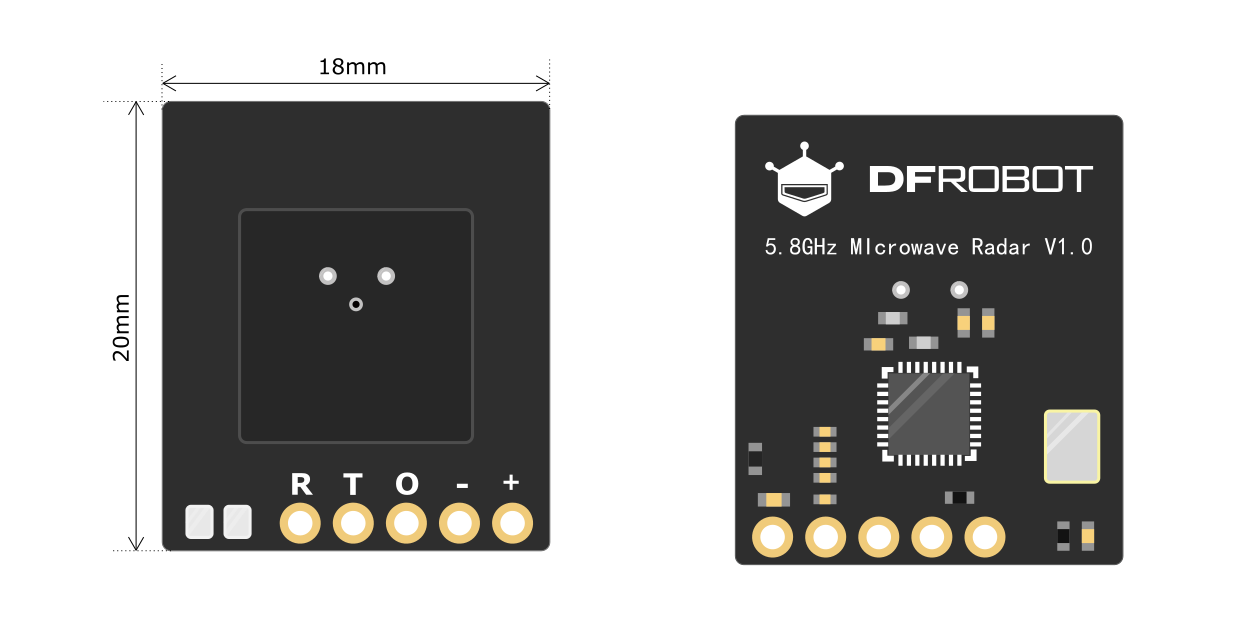
5.8GHz Microwave Radar Module
SKU: SEN0521
The 5.8GHz Microwave Radar Module is an advanced sensor capable of transmitting electromagnetic waves at 5.8GHz, distinguishing between transmitted and reflected waves to detect objects in its area. Unlike traditional sensors, it excels in sensing micro movements such as breathing, enabling accurate human presence detection even when the person is stationary. The module provides output through a serial port or the high/low levels of an I/O port, making it versatile for various applications.