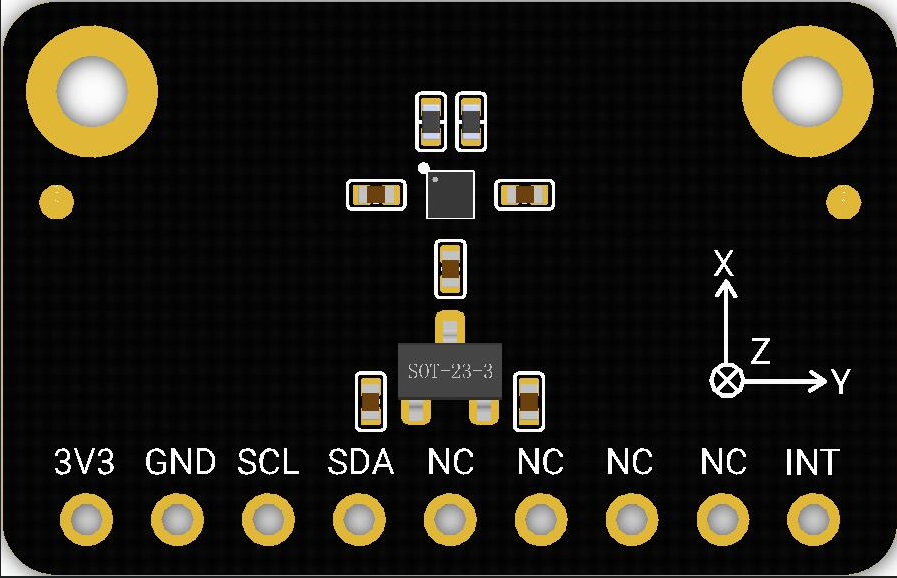
Fermion: BMM350 3-axis Magnetometer Sensor
SKU: SEN0622
Fermion BMM350 is a 3-axis digital geomagnetic sensor using TMR technology. It measures 3-axis magnetic field strength with low power (200uA), low noise (190nT rms@xy, 450nT@z), high range (±2000μT), and selectable sampling rates (400~25/16Hz). Its unique field shock recovery ensures robustness to external fields and high accuracy. Applications include indoor/outdoor navigation, electronic compasses, and AR/VR development.