TF-NOVA Line Laser LiDAR Sensor (14m)
SKU: SEN0671
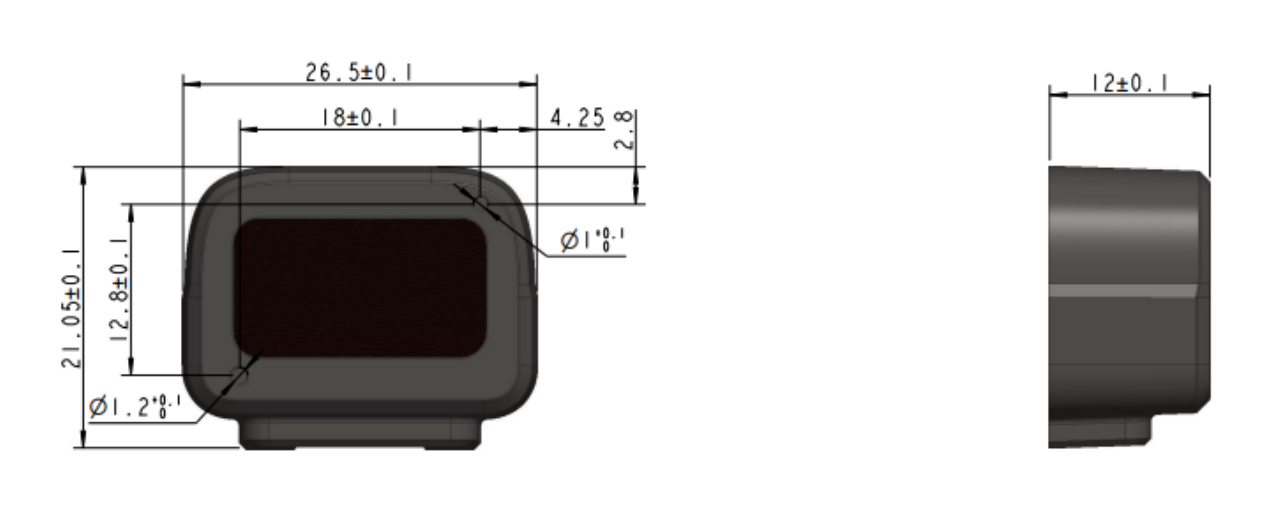
TF-NOVA is a Pulse Time-of-Flight (PToF) sensor that calculates distance by measuring the time between emitted and received laser signals. It features a 14°×1° line-shaped detection area (25×1.7 cm² beyond 1m), ultra-compact dimensions (26.5×21.05×12mm, ~7cm³) for easy integration into space-constrained designs, stable outdoor detection (5cm black obstacles within 2m under sunlight/night), and supports UART/I2C/I/O interfaces.