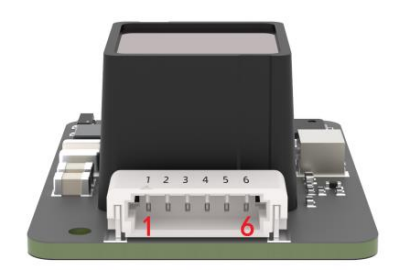
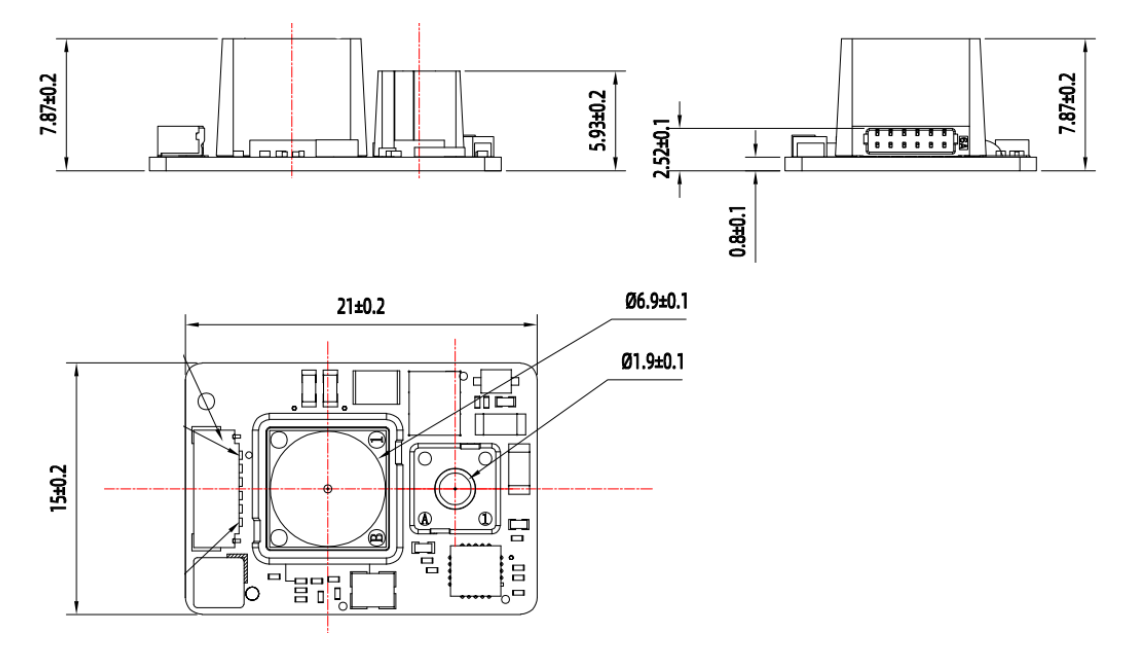
TFS20-L ToF LiDAR Sensor (20m)
SKU: SEN0672
The TFS20-L dToF Ranging Module is a high-precision device capable of measuring distances up to 20 meters. It features a VCSEL light source, high ambient light resistance, and supports versatile communication modes (UART/I2C), making it suitable for a wide range of applications. With its impressive accuracy and precision, this module is designed for demanding environments where reliable distance measurement is crucial.