Gravity: GNSS Positioning & Timing Module
SKU: DFR1103
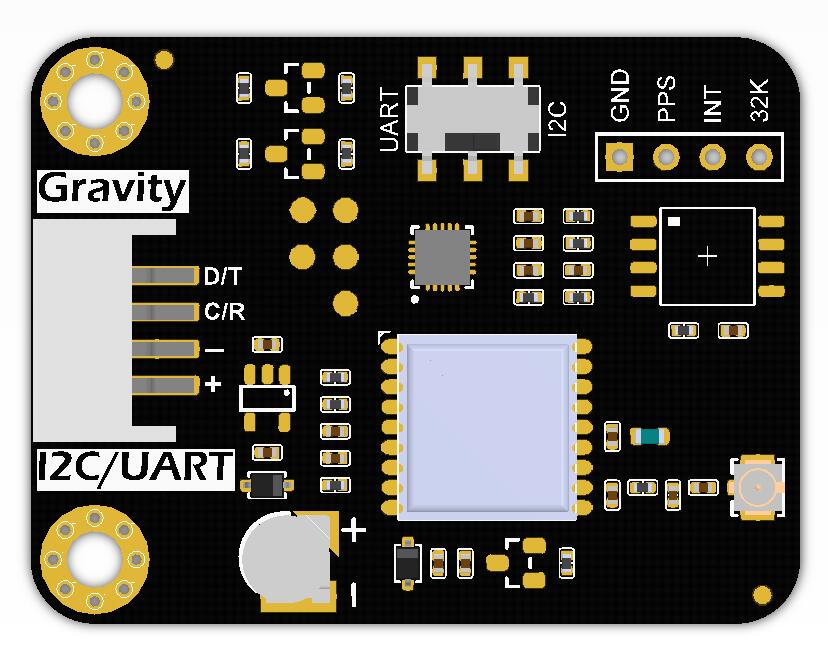
This product is a module integrating GNSS and RTC chips. It receives satellite signals like BeiDou and GPS for accurate time, calibrating RTC to ensure high accuracy and stability. Without GNSS signals, the onboard RTC works. For outdoor low-power scenarios, the API cuts GNSS power to reduce consumption. It suits precise time synchronization applications.