Fermion: LTC4316 I2C Address Shifter Module
SKU: DFR1185
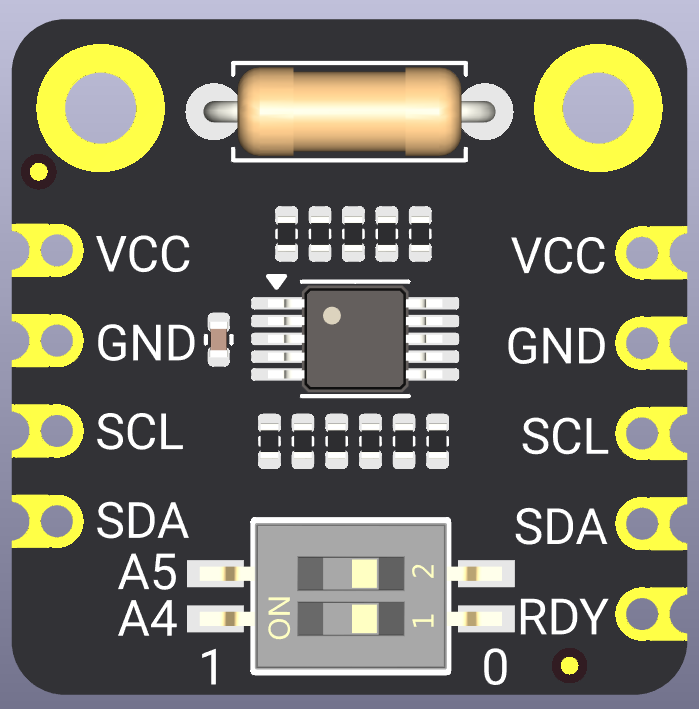
The Fermion I2C Address Shifter Module is designed to enable seamless I2C communication by translating I2C addresses effectively across a voltage range of 2.25V to 5.5V. With a compact design, it supports easy integration into various electronic projects. The module includes a pinout for both controller and sensor sides, ensuring straightforward connections. Its dip switch functionality allows for selective bit inversion of the I2C address, providing flexibility in device management. This ensures compatibility and efficient communication between I2C devices, making it an essential component for projects requiring precise sensor management and address handling.